Featured

Robot gantries are powerful tools in modern manufacturing and automation, offering increased precision, flexibility, and efficiency in a range of applications, as explored in this comprehensive article.
Robot gantries are powerful tools in modern manufacturing and automation, offering increased precision, flexibility, and efficiency in a range of applications, as explored in this comprehensive article.
Single-board computers (SBCs) are the brain of an EV charger. With the EV charging market taking off, SBCs are at the centre of the electrification movement. But what are the challenges that lay ahead? And what do cutting-edge SBCs bring forth?
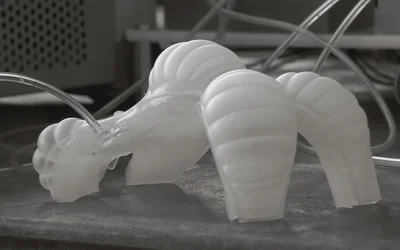
As the field of soft robotics continues to evolve, one of the most critical challenges researchers face is developing reliable and efficient power sources to drive these pliable machines.
This comprehensive article dives deep into the world of robotics, exploring the history, types, engineering components, applications, and future trends of robots, offering readers an in-depth understanding of how these remarkable machines work and shape our lives.
13 minutes read.
11 minutes read.
16 minutes read.
20 minutes read.
16 minutes read.
14 minutes read.



University
At the Harvard John A. Paulson School of Engineering and Applied Sciences (...
42 Posts

Robotics & Automation
READY Robotics is a robotics software company that vastly simplifies robot ...
24 Posts

Automation Machinery Manufacturing
We are a company in flying robotics, specializing in Non-destructive inspec...
23 Posts
Everyone, guess how fast is it?
The new design could assist the elderly as they age in place at home.
The hospitality industry can leverage the gender characteristics of service robots to influence customers' decisions, according to new research from a team in the Penn State School of Hospitality Management.
Service robots have evolved from simple automated machines to intelligent adaptive systems that can navigate unpredictable environments and interact with humans.
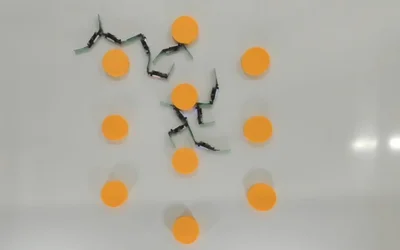
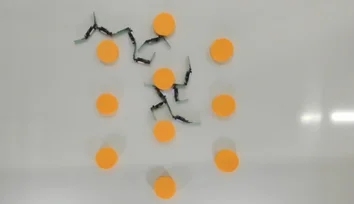
Engineers at Princeton and North Carolina State University have combined ancient paper folding and modern materials science to create a soft robot that bends and twists through mazes with ease.
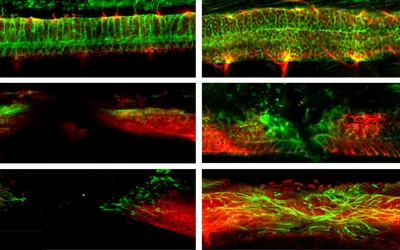
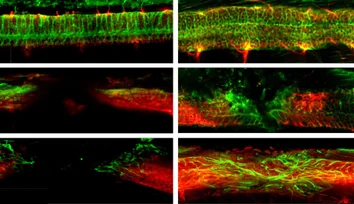
A research team from ETH Zurich and the University of Zurich (UZH) has developed a novel approach to treating spinal cord injuries: controllable microrobots deliver stem cells directly to the site of an injury, where they promote nerve cell regeneration.
Cornell engineers have developed a robotic collective that behaves less like a machine and more like a material that flows, reshapes and adapts to its environment without centralized control.
From hospital wards to crop fields, from microscopic swarms to biohybrid machines powered by fungi, robotics research at Cornell spans an astonishing range of scale, application and ambition.
Robot gantries are powerful tools in modern manufacturing and automation, offering increased precision, flexibility, and efficiency in a range of applications, as explored in this comprehensive article.
Single-board computers (SBCs) are the brain of an EV charger. With the EV charging market taking off, SBCs are at the centre of the electrification movement. But what are the challenges that lay ahead? And what do cutting-edge SBCs bring forth?
As the field of soft robotics continues to evolve, one of the most critical challenges researchers face is developing reliable and efficient power sources to drive these pliable machines.

7 minutes read
Imagine a robot small enough to fit on a U.S. penny. Or even small enough to rest on Lincoln’s chest. It sounds preposterous enough. Now, imagine a robot small enough to rest on the chest of Lincoln – not the Lincoln whose head decorates the front side of the penny, but the even tinier version of him on the back.
As science grows more complex, successful researchers have to rely on more than experiments and calculations: AI is quickly becoming indispensable.

5 minutes read
Robotic assembly lines have revolutionized production processes, enabling manufacturers to achieve high levels of efficiency, productivity, and quality.
Imagine a world with precision medicine, where a swarm of microrobots delivers a payload of medicine directly to ailing cells. Or one where aerial or marine drones can collectively survey an area while exchanging minimal information about their location.

3 minutes read
A large metal vessel of a Floating Storage and Offloading (FSO) unit requires an extensive inspection from every angle, but cramped spaces and high temperatures make the inspection challenging. This inspection was done with a flying robot to avoid putting people in the small and hot areas.

In recent years, the use of devices and systems that utilize data to function in an intelligent manner has become commonplace. Machines that make high-level decisions comparable to humans and those that surpass humans in performing work depending on how they are applied have also appeared.

6 minutes read
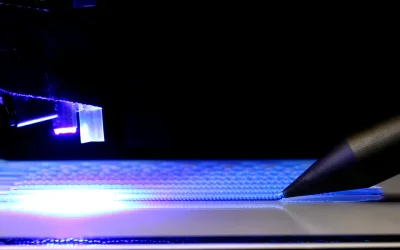
In this episode, we talk about a novel approach to multi-material 3D printing that’ll enable the production of soft components capable of contracting in a similar fashion to muscles.

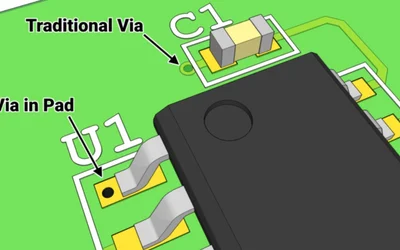
What makes via in pad different from traditional vias? Find out in this short blog.

5 minutes read
SBCs provide the means to create affordable and customizable solutions to integrate predictive maintenance into your production process.
Life in vans and tiny houses doesn’t rule out comfort and connectivity. What if you could use a simple solution like an SBC to turn them into a smart home?
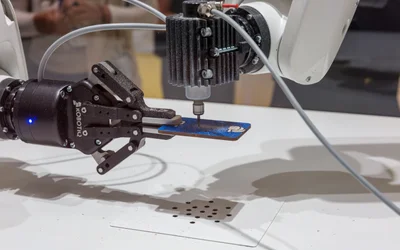
End effectors are critical components of robotic systems, enabling robots to interact with and manipulate their environment in various ways.
Entries to the ROCK Enginering Challenge are using SBCs to address challenges related to climate, education, and emergencies.