
Mario Mauerer, maxon's Global Business Development Manager, Robotics, discusses what it takes for robotic deployments to be successful in complex real-world environments.
Be the first to know.
Get our robot operating system (ros) weekly email digest.
Tagged with
robot operating system (ROS)
ORGANIZATIONS. SHAPING THE INDUSTRY.


InDro Robotics
Robotics and Drones
We empower R&D by providing the computational power, ROS packages, payloads & functionality for your unique use case.
14 Posts

Shadow Robot
Research Services
We build next-generation robot hands and systems with advanced dexterity to...
9 Posts

Visio Nerf
Industrial Automation
Visio Nerf offers 3D sensor solutions dedicated to the automation of painfu...
1 Post

Trossen Robotics
Whether you're a researcher at the top of your field or new to robotics & l...
1 Post

Pickit 3D
Industrial Automation
Guide your robot with Pickit 3D vision systems. Pickit is an ambitious scal...
Latest Posts

event | DEC 10 - DEC 10, 2025
Join Prof. Fei Chen as he explores advanced bimanual manipulation and teleoperation techniques shaping the future of intelligent human-like robots in this expert-led robotics session.


'Link-bots' can move, explore, cooperate without sensing or computation

3 minutes read

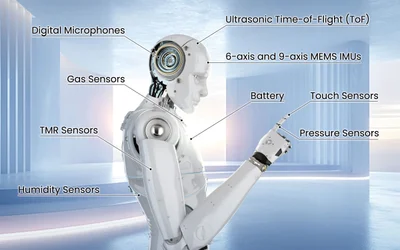
This article is part 4 of a 4-part article series on TDK's advanced robotics.


The ETH spin-off Flink Robotics wants to revolutionize the handling of packages. Its founders Moritz Geilinger and Simon Huber have developed software that allows robots to work together and quickly take on new tasks.

5 minutes read


Camera-equipped robotic systems serve as key expansion components within this industry because they improve efficiency and accuracy across multiple fields, including manufacturing, healthcare, logistics, and autonomous vehicle development.


A team of Caltech researchers has developed an analogous algorithm for autonomous robots—a planning and decision-making control system that helps freely moving robots determine the best movements to make as they navigate the real world.

4 minutes read


The widespread adoption of robotics is hindered by the complexity of system integration, lack of skilled labor, and diverse programming languages, but FuzzyRTOS addresses these challenges by providing a universal platform that simplifies robot programming.

3 minutes read


Recap of the Third Annual Showcase of Smart Mobility

9 minutes read

The New InDro Command Module: Amazing Power in a Tiny Package
5 minutes read


In this project, we will configure the AMD Kria™ KR260 Robotics Starter Kit to control a Trossen Robotics ReactorX 150 robot arm. This complex robot arm uses ROBOTIS DYNAMIXEL servos, which contain not only motors but also microcontrollers and networking capability.

6 minutes read

Noise suppression includes both emission and immunity suppression, and various measures are in place in robots to prevent malfunction due to immunity.

14 minutes read

An R&D Powerhouse
4 minutes read


Robot Operating System (ROS) drivers were developed on Analog Devices products so that they can be readily used within a ROS ecosystem. This article will give an overview on how to use and integrate these drivers in their applications, products, and systems.
8 minutes read

MATT Framework is the core software application that was designed to allow users to calibrate, prototype, develop testing scenarios, and manually operate the MATT robot, making it as easy to interact with as possible.

5 minutes read
