Featured

Industrial and robotics designers strive for higher safety integrity with the NXP S32K microcontroller.
Industrial and robotics designers strive for higher safety integrity with the NXP S32K microcontroller.
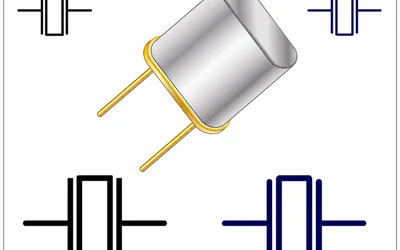
Every embedded design needs a clock, but not every clock needs the same source. This guide compares bare quartz crystals against packaged crystal oscillators, including TCXO, OCXO, VCXO, and MEMS variants, to help engineers pick the right timing component.
The Arduino® UNO™ Q board is designed to bring AI to the edge. Unlock its potential to access a huge variety of applications.
This comprehensive article dives deep into the world of robotics, exploring the history, types, engineering components, applications, and future trends of robots, offering readers an in-depth understanding of how these remarkable machines work and shape our lives.
18 minutes read.
13 minutes read.
13 minutes read.
11 minutes read.
16 minutes read.



University
At the Harvard John A. Paulson School of Engineering and Applied Sciences (...
42 Posts

Robotics & Automation
READY Robotics is a robotics software company that vastly simplifies robot ...
24 Posts

Automation Machinery Manufacturing
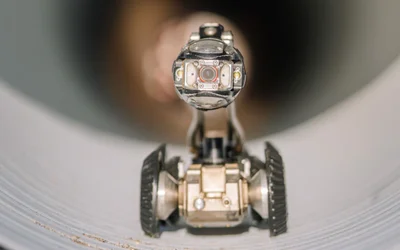
We are a company in flying robotics, specializing in Non-destructive inspec...
23 Posts
Everyone, guess how fast is it?
The new design could assist the elderly as they age in place at home.
The hospitality industry can leverage the gender characteristics of service robots to influence customers' decisions, according to new research from a team in the Penn State School of Hospitality Management.
Service robots have evolved from simple automated machines to intelligent adaptive systems that can navigate unpredictable environments and interact with humans.
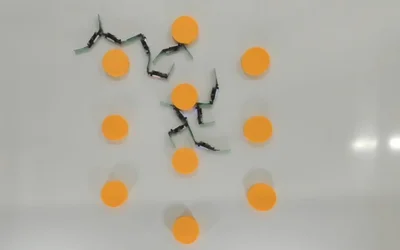
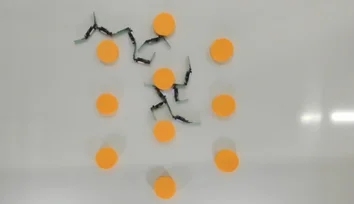
Engineers at Princeton and North Carolina State University have combined ancient paper folding and modern materials science to create a soft robot that bends and twists through mazes with ease.
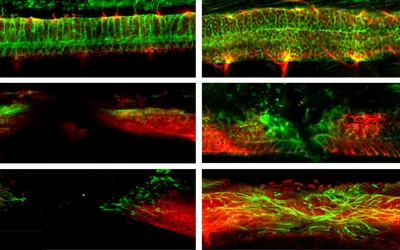
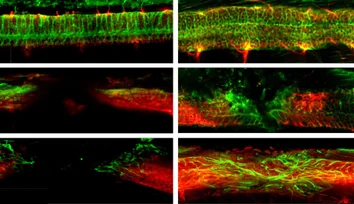
A research team from ETH Zurich and the University of Zurich (UZH) has developed a novel approach to treating spinal cord injuries: controllable microrobots deliver stem cells directly to the site of an injury, where they promote nerve cell regeneration.
Cornell engineers have developed a robotic collective that behaves less like a machine and more like a material that flows, reshapes and adapts to its environment without centralized control.
From hospital wards to crop fields, from microscopic swarms to biohybrid machines powered by fungi, robotics research at Cornell spans an astonishing range of scale, application and ambition.
Industrial and robotics designers strive for higher safety integrity with the NXP S32K microcontroller.
Every embedded design needs a clock, but not every clock needs the same source. This guide compares bare quartz crystals against packaged crystal oscillators, including TCXO, OCXO, VCXO, and MEMS variants, to help engineers pick the right timing component.
The Arduino® UNO™ Q board is designed to bring AI to the edge. Unlock its potential to access a huge variety of applications.

6 minutes read
From LTDC-X3 LiDAR ICs to capacitive and environmental sensors: see how one ScioSense component toolkit supports perception across six robotics segments.
Researchers combined an efficient algorithm with dedicated hardware to rapidly generate 3D maps for navigation using minimal memory and power.
ZenCell by PriscoZen leverages the Arduino® UNO™ Q dual architecture to replace two boards with one.
3 minutes read
Diffusion-MPC helps robot plan tasks
He built an AI agent that watches him work, and documents builds for him. Powered by the Arduino® UNO™ Q. In four hours.
3 minutes read
Electronic power stage and control choices for brushless DC motors.
Inside the hands-on EchoGlow workshop, where makers trained and deployed on-device AI on the new Arduino® UNO™ Q at Hackaday Europe, 2026
Understanding the device physics, trade-offs, and design guidance for power electronics
EPFL researchers are developing AI models that could one day enable vision prosthetics able to restore meaningful, object-level sight for the blind.
From simple sensor control to connected, intelligent devices, embedded systems often outgrow a single MCU. Pairing an MCU with Linux adds power and flexibility, but also introduces communication challenges, dual development workflows, and increasing software complexity.
4 minutes read
Engineers at Princeton and North Carolina State University have combined ancient paper folding and modern materials science to create a soft robot that bends and twists through mazes with ease.
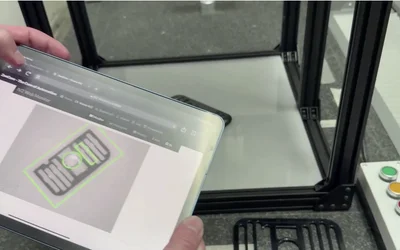
A deep-dive listicle guiding controls, automation, and quality engineers toward the best vision systems for manufacturing applications in 2026.