Featured

Flightmare is an open-source simulator for quadrotors that moves away from rigid paradigms and proposes a flexible modular structure that empowers the users or automated algorithms to fine-tune the simulator to the task at hand.

June 25, 2026 at 08:00 PM Central European Summer Time
Flightmare is an open-source simulator for quadrotors that moves away from rigid paradigms and proposes a flexible modular structure that empowers the users or automated algorithms to fine-tune the simulator to the task at hand.
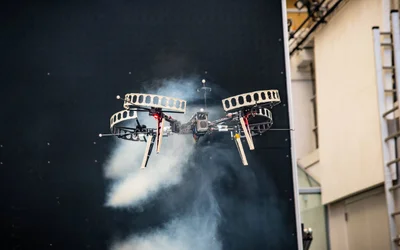
In this episode, we talk about how researchers are developing tools to keep us safe using technology that ranges from ultra-heat resistant tents for fighters to drones capable of discovering hidden landmines.
DTU spinout solves mine clearance tasks for the Danish Defence and the offshore wind turbine industry.
Unveiling the Duel of Digital Design - A Comprehensive Exploration of History, Syntax, and Applications of the two popular hardware description languages
16 minutes read.


Robotics and Drones
We empower R&D by providing the computational power, ROS packages, payloads & functionality for your unique use case.
14 Posts

Drone Fleet Management Software
Cloud Ground Control is a cloud based command and control solution for oper...
7 Posts
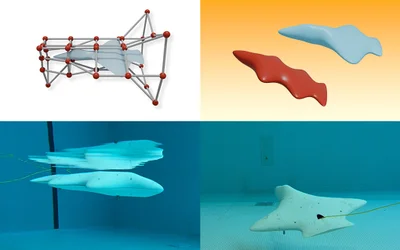
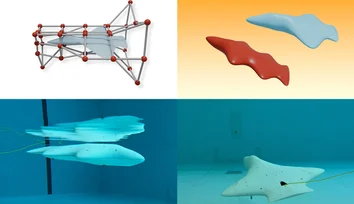
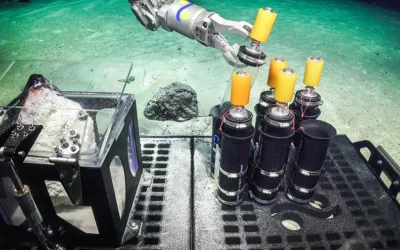
An AI pipeline developed by CSAIL researchers enables unique hydrodynamic designs for bodyboard-sized vehicles that glide underwater and could help scientists gather marine data.
A spherical prototype with "nimble dimples" can change its surface from smooth to dimpled, cutting through drag and generating lift.
Helping Maintain Stable Position in Fast-Moving Waters
Launched by MIT Sea Grant, SeaPerch and SeaPerch II have had a big impact on young learners interested in ocean science and engineering.
How to Maximize Your Robot Without Blowing Your Budget
Discover how Deep Trekker rigorously tests and evaluates IMU technologies, comparing MEMS and FOG systems to ensure precise underwater navigation for ROVs.
Discover the vital role of underwater positioning in marine science, and how remotely operated vehicles (ROVs) are leading the way in location tracking.
Flightmare is an open-source simulator for quadrotors that moves away from rigid paradigms and proposes a flexible modular structure that empowers the users or automated algorithms to fine-tune the simulator to the task at hand.
In this episode, we talk about how researchers are developing tools to keep us safe using technology that ranges from ultra-heat resistant tents for fighters to drones capable of discovering hidden landmines.

DTU spinout solves mine clearance tasks for the Danish Defence and the offshore wind turbine industry.

3 minutes read
Monthly robotics news blog. Discover the latest products, research, tutorials, and security news for robotics.

6 minutes read
with Xsens MTi-200

4 minutes read
Using smart sensor and measurement techniques to make farming more efficient and sustainable is the goal of a team of researchers at TUM.
Tests conducted by Cornell and the U.S. Navy used new algorithms to outperform state-of-the-art programming for autonomous underwater sonar imaging, significantly improving the speed and accuracy for identifying objects such as explosive mines, sunken ships, airplane black boxes, pipelines, etc.

2 minutes read
Engineers at EPFL and the University of Geneva believe they hold the key to automated drone mapping. By combining artificial intelligence with a new algorithm, their method promises to considerably reduce the time and resources needed to accurately scan complex landscapes.
To be truly useful, drones—that is, autonomous flying vehicles—will need to learn to navigate real-world weather and wind conditions.

4 minutes read
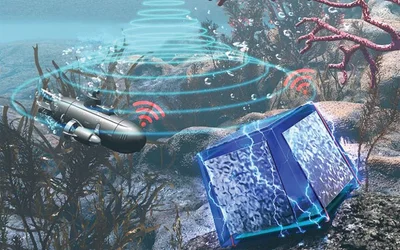
A team of researchers in Korea has been working on functional acoustic energy transmission (AET) systems, and their latest paper details a major breakthrough: Prototypes capable of powering LEDs, sensors, and Bluetooth transmitters at range and through materials include metal, tissue, and water.
In this episode, we talk about how an app leveraging 3 sets of machine learning algorithms aims to reduce waste and emissions by creating 3D models of feet and the hoverfly inspired AI that will be keeping airfields safe from small drones via acoustic mapping and filtering.
Beyond leisure, drones offer enormous potential for developing a wide array of innovative applications that benefit society.

3 minutes read
Could drones provide a safe and effective alternative to sending out ships, helicopters and cranes in future, and could they take some of the pressure off of maintenance staff?

3 minutes read
With growing concern over microplastics from ocean waste, autonomous underwater vehicles — AUVs — have been proposed as a tool for cleaning up our seas, but only if they can pick the plastics out from the fish: Enter these tweaked EfficientDets, boosting accuracy for the task.
An ROV camera is any visual imaging system that can be used on underwater ROVs to provide the operator with a perception of the operating environment. The depth rating for an ROV camera usually starts at 300m.

3 minutes read