With Xsens MTi-3

3 minutes read
Tagged with
With Xsens MTi-3
3 minutes read
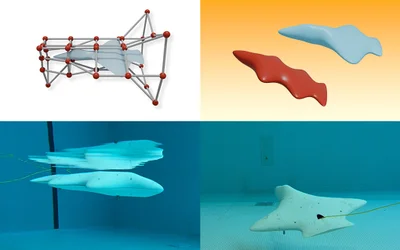
An AI pipeline developed by CSAIL researchers enables unique hydrodynamic designs for bodyboard-sized vehicles that glide underwater and could help scientists gather marine data.
A spherical prototype with "nimble dimples" can change its surface from smooth to dimpled, cutting through drag and generating lift.

4 minutes read
Helping Maintain Stable Position in Fast-Moving Waters
4 minutes read
Sustainable monitoring of the marine environment is crucial for the environmentally responsible operation of offshore wind farms and the protection of biodiversity. In the SeaMe project, RWE together with research partners to develop innovative technologies for comprehensive ecosystem monitoring.
With Xsens MTi AHRS
3 minutes read
The all new Xsens Sirius series has been engineered to enable true autonomy in harsh conditions
3 minutes read
This article introduces two sensing products. One enables wireless monitoring of water leaks, while the other allows monitoring of humidity and temperature in critical electronics.
Examining the latest developments in self-driving vehicles.
The device could help scientists explore unknown regions of the ocean, track pollution, or monitor the effects of climate change.
with Xsens MTi-200
4 minutes read
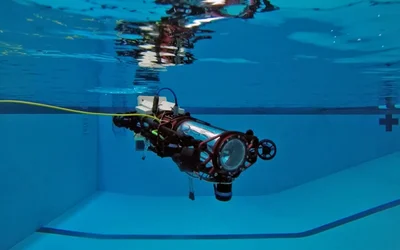
Tests conducted by Cornell and the U.S. Navy used new algorithms to outperform state-of-the-art programming for autonomous underwater sonar imaging, significantly improving the speed and accuracy for identifying objects such as explosive mines, sunken ships, airplane black boxes, pipelines, etc.

2 minutes read
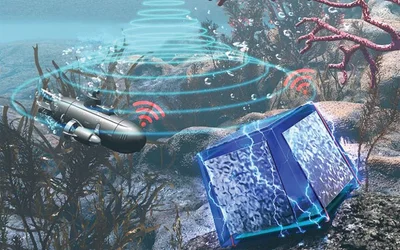
A team of researchers in Korea has been working on functional acoustic energy transmission (AET) systems, and their latest paper details a major breakthrough: Prototypes capable of powering LEDs, sensors, and Bluetooth transmitters at range and through materials include metal, tissue, and water.
With growing concern over microplastics from ocean waste, autonomous underwater vehicles — AUVs — have been proposed as a tool for cleaning up our seas, but only if they can pick the plastics out from the fish: Enter these tweaked EfficientDets, boosting accuracy for the task.
An ROV camera is any visual imaging system that can be used on underwater ROVs to provide the operator with a perception of the operating environment. The depth rating for an ROV camera usually starts at 300m.

3 minutes read