Top Uses of Underwater ROV Manipulators
The aim of this article is to provide a high-level answer to the question: “What do people use underwater robotic arms for?” If you’ve worked with Remotely Operated Vehicles (ROVs) before, this article probably isn’t for you. For everyone else, let’s go.
31 Mar, 2022. 6 minutes read
Doing things underwater has always been challenging. Human divers brave the pressures of the deep subsea environment, dealing with low light, poor visibility, and little room for error. Since the 1970s, technology developments gave rise to ROVs with robotic arms (aka ‘underwater manipulator arms’) to start accomplishing tasks underwater.
Industries that use ROV manipulators include offshore energy, military, search and rescue, and marine science.
Whilst not as dexterous as humans, these ROV manipulator systems are stronger and can go deeper than humans can dive. This ushered in a new era for offshore oil companies who could now install and maintain deeper installations.
Originally, ROV manipulators were large and hydraulically powered. Today, whilst large hydraulic manipulators are still the workhorse of the ROV industry, electric systems have started to be released to the market. In particular, smaller electric ROV manipulators that are still highly dexterous have opened up new possibilities for the ROV community.
Here are the top 9 uses of underwater ROV manipulators based on working with our clients here at Blueprint Lab.
1. Non-Destructive Testing (NDT)
Non-Destructive Testing (NDT), and sometimes called NDE or NDI for examination and inspection respectively, is the process of using non-invasive means to inspect a component or structure to detect cracking, corrosion, or other defects within the material.
Offshore oil rigs will sit in the water, braving the elements, salt corrosion, and marine growth for 20-30 years. To ensure that these structures and other water-based assets remain safe, there are regulations that govern their Inspection, Maintenance, and Repair (IMR). Disasters such as what happened to the Alexander L Kiellande oil platform in 1980 or more recent near misses in the Gulf of Mexico have been caused by cracking and corrosion of subsea structures left unchecked.
Manipulators and human divers routinely carry out inspections of structures for cracking or corrosion using Ultrasonic Thickness (UT), Cathodic Protection (CP), or Alternating Current Field Measurement instruments. ROV manipulators that are dexterous, more compact, and have advanced software control (including being able to precisely control the position and orientation of the instrument) have enabled small ROVs to carry out these tasks completely remotely. Companies such as Fugro are pioneering remote operations where an Unmanned Surface Vehicle (USV) hosting an ROV can deploy and inspect infrastructure using dexterous manipulators.
2. Dexterous (Human-Like) Intervention
Achieving the same (or better) level of dexterity as a human is the holy grail of dexterous robotic manipulation. Huge progress has been made in recent years in terms of the size and joint dexterity of robotic manipulators above and below the water. One current limitation is the ability to achieve precise, small-scale dexterity. Land robots have demonstrated the use of robotic hands with fingers; successfully manufacturing similar technologies underwater is far more difficult and yet to be commercially solved.
Some dexterous tasks such as tying a knot, attaching a carabiner, or fastening a nut to a bolt have all been demonstrated using underwater manipulator technology. This has allowed industries to use robotic manipulators for net repair in aquaculture settings, and conduct complex military tasks.


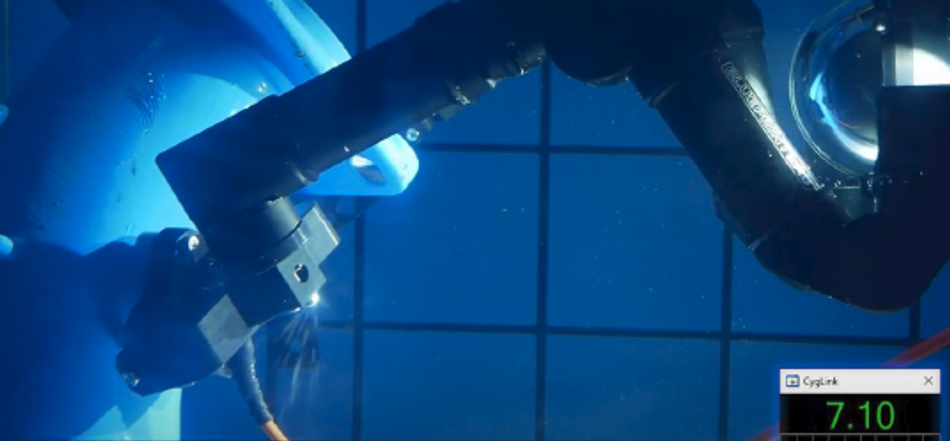
3. Construction And Repair
With hydraulic and electric actuators able to exceed the capability of humans, underwater manipulator arms are used for moving large tools and instruments around to aid in the construction, maintenance, repair, and decommissioning of a whole range of subsea infrastructure. In the offshore energy industry, manipulators move large hooks attached to cables for deployment and recovery of subsea infrastructure and wield torque tools or welding torches.

4. Close Visual Inspection
Like NDT, Close Visual Inspection (CVI) is concerned with looking at infrastructure with HD subsea cameras to detect any issues that need repair or follow up. Manipulators with good reach (length) and dexterity enable CVI in hard-to-reach areas such as inside pipe inlets and behind propellers.
This ability for confined space access is a value-add offered by more modern, compact, electric manipulators like Blueprint Lab’s Reach Alpha and Reach Bravo. Leveraging HD CVI allows for Underwater Inspection in Lieu of Dry-docking (UWILD). UWILD, as the name suggests, is the CVI/NDT of a ship’s hull that avoids needing to take the vessel out of the water; a huge cost and efficiency saving.

5. Cleaning/Anti-Fouling
Over time, subsea infrastructure can become coated in marine growth (barnacles etc) and other biofouling substances. To properly inspect the condition of the infrastructure (using NDT or CVI methods), surfaces must be cleaned of any marine growth. This is generally done by using high-power water pressure, a cavitation blaster, or a rotary brush.
In some scenarios, this will be done using a fixed system on the ROV. In other cases, the dexterity of a manipulator is required or beneficial to adequately reach all areas that need to be inspected. This is especially relevant where the geometry of the inspection area is more complex, such as at the weld nodes of a jack-up rig.

6. Sea Mine And UIED Intervention
Military clearance divers carry out dangerous tasks including deploying a shaped charge to disarm a mine or examining and disrupting a Waterborne Improvised Explosive Device (WBIED). These tasks are still done by humans because they require high fidelity perception and dexterous intervention capabilities not previously available through a remote solution. Recently, with the release of more dexterous, compact manipulator arms like the Reach Alpha, military organisations are investigating ways for ROVs to start to do some of these more dangerous tasks.

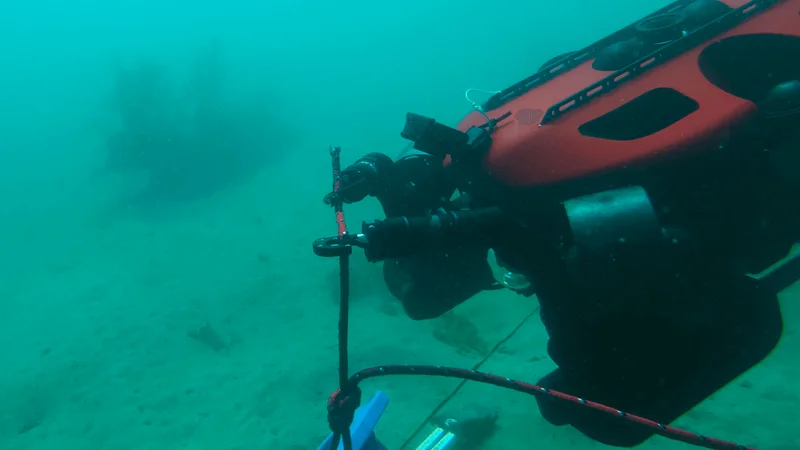
7. Special Recovery Operations (e.g. Downed Aircraft, Drowning Victims)
Special Recovery Operations include scenarios such as recovering a downed aircraft from the seafloor or drowning victims from a lakebed. These sensitive tasks have historically been conducted by highly skilled military or civilian diver teams. Recently ROVs have been able to assist and in some cases take-over, these high-risk tasks.
Dexterous manipulators can be used to tie knots or attach carabiners to recover objects or for the recovery of forensic items without disturbing the lake/sea bed.

8. Oceanography And Hydrography (Sampling And Measurement)
Understanding the condition of our marine environment is critical for building a global picture of the Earth’s ecosystem. Scientists regularly take samples from the sea bed for analysis and collect marine organisms for biological study. In some cases, sampling and organism collection requires precise positioning of a sampling device as well as the ability to retrieve a sample without stirring up sediment from the seafloor. Additionally, measuring devices (rulers and callipers) are often used to properly characterize an object of interest. In these cases, a dexterous manipulator allows for the ROV to sit on the seafloor and for confined areas to be reached (such as amongst a coral reef)

9. Autonomy And Custom Control
Robotics and Autonomous Systems researchers around the world are pioneering the use of underwater robots in a variety of autonomous applications. Some examples of this are using manipulators to autonomously interact with a subsea control panel or using multiple robots to lift, carry, and place an object, thereby utilising the lift capacity of more than one underwater vehicle.
Final Thoughts
The uses of underwater ROV manipulators are varied and constantly expanding. As a company, Blueprint Lab is seeking not just to make incredible robotic arms, but to actually solve industry problems. We constantly discuss and explore the problems that our clients are trying to solve and have multiple projects in work regarding underwater manipulation, perception and control.