Featured
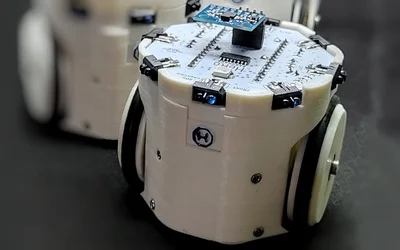
Designed using off-the-shelf parts, a low-cost microcontroller, and a 3D-printed chassis, the HeRo 2.0 robot costs just $18 to build — and is at the heart of an effort to open swarm robotics up to a broader audience.

June 25, 2026 at 08:00 PM Central European Summer Time
Designed using off-the-shelf parts, a low-cost microcontroller, and a 3D-printed chassis, the HeRo 2.0 robot costs just $18 to build — and is at the heart of an effort to open swarm robotics up to a broader audience.
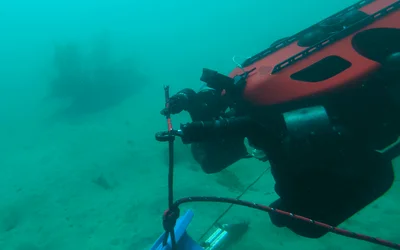
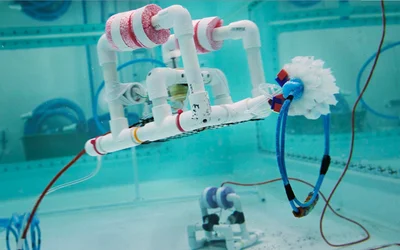
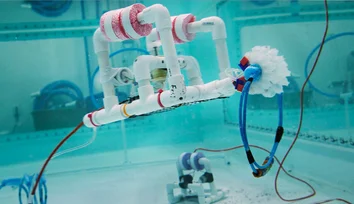
The aim of this article is to provide a high-level answer to the question: “What do people use underwater robotic arms for?” If you’ve worked with Remotely Operated Vehicles (ROVs) before, this article probably isn’t for you. For everyone else, let’s go.
This is a multicopter that can fly close to bridges, overpasses, and other pieces of large infrastructure to perform high-pressure washing. Water is pumped to high pressure on the ground, then sent to the drone via a hose.
Unveiling the Duel of Digital Design - A Comprehensive Exploration of History, Syntax, and Applications of the two popular hardware description languages
16 minutes read.


Robotics and Drones
We empower R&D by providing the computational power, ROS packages, payloads & functionality for your unique use case.
14 Posts

Drone Fleet Management Software
Cloud Ground Control is a cloud based command and control solution for oper...
7 Posts
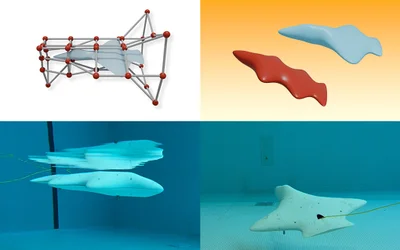
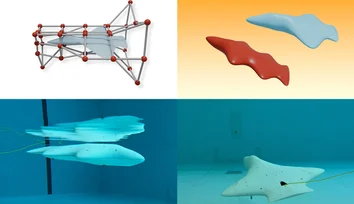
An AI pipeline developed by CSAIL researchers enables unique hydrodynamic designs for bodyboard-sized vehicles that glide underwater and could help scientists gather marine data.
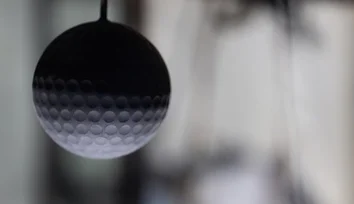
A spherical prototype with "nimble dimples" can change its surface from smooth to dimpled, cutting through drag and generating lift.
Helping Maintain Stable Position in Fast-Moving Waters
Launched by MIT Sea Grant, SeaPerch and SeaPerch II have had a big impact on young learners interested in ocean science and engineering.
How to Maximize Your Robot Without Blowing Your Budget
Discover how Deep Trekker rigorously tests and evaluates IMU technologies, comparing MEMS and FOG systems to ensure precise underwater navigation for ROVs.
Discover the vital role of underwater positioning in marine science, and how remotely operated vehicles (ROVs) are leading the way in location tracking.
Designed using off-the-shelf parts, a low-cost microcontroller, and a 3D-printed chassis, the HeRo 2.0 robot costs just $18 to build — and is at the heart of an effort to open swarm robotics up to a broader audience.
The aim of this article is to provide a high-level answer to the question: “What do people use underwater robotic arms for?” If you’ve worked with Remotely Operated Vehicles (ROVs) before, this article probably isn’t for you. For everyone else, let’s go.

6 minutes read
This is a multicopter that can fly close to bridges, overpasses, and other pieces of large infrastructure to perform high-pressure washing. Water is pumped to high pressure on the ground, then sent to the drone via a hose.
A Quick Start Guide to Underwater ROVs. In this guide, you’ll learn about what defines a remotely operated vehicle, different types of ROVs, and what they are used for. Underwater ROVs are used to observe and interact underwater across a range of industries.
9 minutes read
Is there life on Jupiter's moon Europa? An ocean suspected to be under miles of ice gives science hope. But how could it be reached and explored? Researchers at the DFKI Robotics Innovation Center have been investigating this question since 2012 in the Europa Explorer project series.
The research objective is to accurately represent the three-dimensional flows and turbulence in the lowest layer of the atmosphere.

3 minutes read
In this episode, we talk about how UAVs are being deployed to control destructive pigeon populations and to study bottlenose dolphin populations.

University of Aberdeen has partnered with Duke University to develop a UAV system capable of studying bottlenose dolphins to determine how environmental changes impact the populations
To satisfy the increasing requirements for speed and accuracy of Quadcopters, a Ph.D. student proposed novel designs and approaches in estimation and control algorithms.
What happens when the radio connection to a drone is interrupted? How can drones fly autonomously even in congested traffic? These and other questions were addressed by the German Aerospace Center (DLR) in the final phase of its City Air Traffic Management (City-ATM) project.
5 minutes read
Protolab's supported General Drones with the creation of numerous high-density and low-porosity parts that made up the Auxdron LFG; a purpose-built drone which responds to emergencies at sea.

4 minutes read
In this episode, we talk about additive manufacturing being used to create fuel injection nozzles for marine applications and the subterranean 3D printed drone being used to combat food insecurity.
2 minutes read
In this episode, we talk about an initiative from EPFL to allow those with spinal cord injuries to control robots for help with day-to-day tasks and MIT’s bug robots that are taking big strides for small scaled bio-robotics.
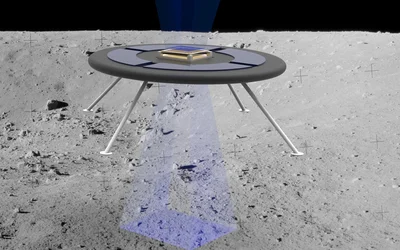
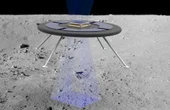
In this episode, we talk about MIT’s new ion propelled hovering rover destined to change the way we explore our universe and an emergency drone coming from TUM hoping to reduce the fatalities caused by cardiac arrest episodes.
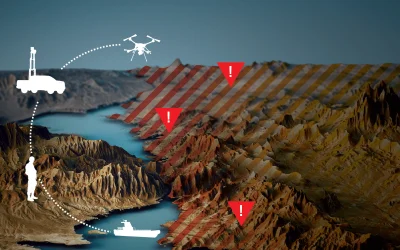
Vision is the cornerstone of every border surveillance platform. Pushing the boundaries of what we can see—from high ground and binoculars to electro-optics and infrared sensors—is the determining factor of a system’s efficacy.