Featuredcase study
Using an intelligent flying robot for NDT inspections of water tanks helps to access hard-to-reach areas

Using an intelligent flying robot for NDT inspections of water tanks helps to access hard-to-reach areas
Using an intelligent flying robot for NDT inspections of water tanks helps to access hard-to-reach areas
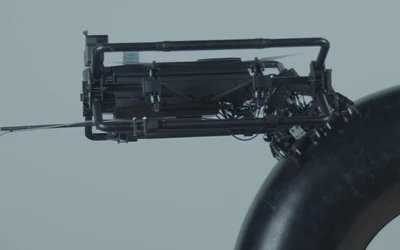
Intelligent flying robots can perform Non-Destructive Testing inspections on various assets across various industries, including tanks, towers, pipes, flare stacks, ships, and more.
Delta arms are high-performance robotic arms that use parallel linkages and jointed construction to provide fast, precise, and flexible movement, making them ideal for various industrial and manufacturing applications.
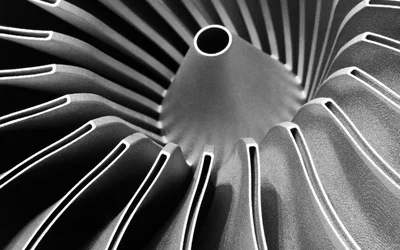
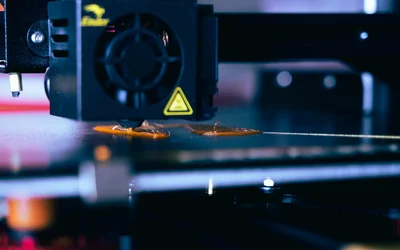
Metal 3D printing is transforming manufacturing by allowing engineers to produce complex, high performance parts directly from digital designs.
16 minutes read.



Research Services
We build next-generation robot hands and systems with advanced dexterity to...
9 Posts
In this episode, we explore two cutting-edge environmental robots developed by ETH Zurich students: MONKEE, a tree-climbing robot for canopy research, and ReefRanger, an autonomous underwater robot that feeds and monitors corals.
Around 100 Bachelor's students from the Department of Mechanical and Process Engineering have spent two semesters working on their Focus projects in 11 teams. They will present the results of their projects on 28 May.
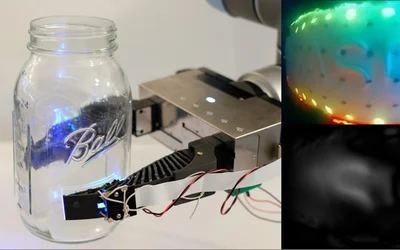
Columbia Engineering computer scientists introduce a novel system that mimics human tactile sensing capabilities in robots.
Price below $90k
An annual industry event focused on additive manufacturing, industrial 3D printing, and advanced manufacturing technologies in Europe.
Princeton researchers have combined brain cells and advanced electronics into a 3D device that can be programmed to recognize patterns using computational techniques.
The Future of Metal AM is moving faster than ever. Are you keeping pace?
Organised by Dublin City University, Ireland, and the 4D Printing Society
Using an intelligent flying robot for NDT inspections of water tanks helps to access hard-to-reach areas

2 minutes read
Intelligent flying robots can perform Non-Destructive Testing inspections on various assets across various industries, including tanks, towers, pipes, flare stacks, ships, and more.
Delta arms are high-performance robotic arms that use parallel linkages and jointed construction to provide fast, precise, and flexible movement, making them ideal for various industrial and manufacturing applications.
Refineries are known for operating under harsh conditions of high pressure and temperature, which can cause damage to equipment over time, leading to defects such as internal corrosion, cracking, and erosion.
3 minutes read
Articulated robots are highly versatile and efficient robots that have the ability to mimic human arm movements for various industrial and commercial applications.
Could this be the time we say goodbye to robotic awkwardness and hello to seamless motion? This article highlights the groundbreaking concept of whole-body control, a coordinated robotic motion technique that resembles natural movement. Imagine a robot smoothly navigating its environment, performing tasks with grace and precision. This innovative approach allows for improved efficiency and greater versatility in real-world settings.
Clone Robotics’ humanoid hand uses hydraulics to mimic complex human hand function.
Ever wondered how robotic arms achieve precise movement in manufacturing, healthcare, or logistics? It’s all about smart design — from sturdy components and kinematics to advanced control systems. Discover how these elements work together to deliver accuracy, flexibility, and real-world efficiency.
Robotic joints, which are sometimes known as axes, are the moveable parts of a robot that cause relative motion between adjacent links. These links refer to the rigid components that connect the joints to ensure their proper and straightforward operation.
Intelligent Flying Robots is a revolutionary approach to Non-Destructive Testing (NDT) that enables accurate contact-based inspection to fulfill industrial asset inspection standards with many advantages.
3 minutes read
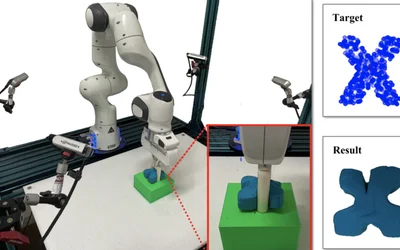
The inner child in many of us feels an overwhelming sense of joy when stumbling across a pile of the fluorescent, rubbery mixture of water, salt, and flour that put goo on the map: play dough. (Even if this happens rarely in adulthood.)
In this episode, we talk about how engineers are tackling the problem of sorting through piles using robotics and a platform that leverages fake data to train robots more efficiently.

Columbia Engineers build a robot that learns to understand itself, rather than the world around it
In a recent project, Professor Edward Adelson and Sandra Liu — a mechanical engineering PhD student at CSAIL — have developed a robotic gripper using novel “GelSight Fin Ray” fingers that, like the human hand, is supple enough to manipulate objects.
In this episode, we talk about how ostriches are inspiring a new generation of bipedal robots and the innovation enabling remote endovascular surgery.