Featured
Researchers at CMU combined two vision foundational models—models trained on large visual data sets—to help a robot arm recognize the shape and the type of fruit and vegetable slices.

Researchers at CMU combined two vision foundational models—models trained on large visual data sets—to help a robot arm recognize the shape and the type of fruit and vegetable slices.
Researchers at CMU combined two vision foundational models—models trained on large visual data sets—to help a robot arm recognize the shape and the type of fruit and vegetable slices.
Modern robots know how to sense their environment and respond to language, but what they don’t know is often more important than what they do know. Teaching robots to ask for help is key to making them safer and more efficient.
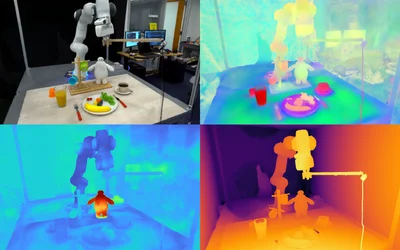
By blending 2D images with foundation models to build 3D feature fields, a new MIT method helps robots understand and manipulate nearby objects with open-ended language prompts.
Metal 3D printing is transforming manufacturing by allowing engineers to produce complex, high performance parts directly from digital designs.
16 minutes read.



Research Services
We build next-generation robot hands and systems with advanced dexterity to...
9 Posts
In this episode, we explore two cutting-edge environmental robots developed by ETH Zurich students: MONKEE, a tree-climbing robot for canopy research, and ReefRanger, an autonomous underwater robot that feeds and monitors corals.
Around 100 Bachelor's students from the Department of Mechanical and Process Engineering have spent two semesters working on their Focus projects in 11 teams. They will present the results of their projects on 28 May.
Columbia Engineering computer scientists introduce a novel system that mimics human tactile sensing capabilities in robots.
Price below $90k
An annual industry event focused on additive manufacturing, industrial 3D printing, and advanced manufacturing technologies in Europe.
Princeton researchers have combined brain cells and advanced electronics into a 3D device that can be programmed to recognize patterns using computational techniques.
The Future of Metal AM is moving faster than ever. Are you keeping pace?
Organised by Dublin City University, Ireland, and the 4D Printing Society
Researchers at CMU combined two vision foundational models—models trained on large visual data sets—to help a robot arm recognize the shape and the type of fruit and vegetable slices.

3 minutes read
Modern robots know how to sense their environment and respond to language, but what they don’t know is often more important than what they do know. Teaching robots to ask for help is key to making them safer and more efficient.

5 minutes read
By blending 2D images with foundation models to build 3D feature fields, a new MIT method helps robots understand and manipulate nearby objects with open-ended language prompts.
Achieving precision is a must in ultrasonic inspections, but it's not always straightforward

2 minutes read
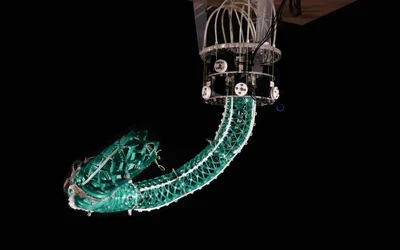
EPFL researchers have designed a bio-inspired robot with a novel trimmed helicoid structure that allows for a wide range of motion and safe interaction with humans.
Humans excel at manual tasks, and ideally, robots should surpass us in these functions. We have the advantage due to our superior dexterity, and we can perform tasks that robots should, in theory, be capable of. As we advance robotics our goal is to effectively transfer our human skills to robots.

6 minutes read
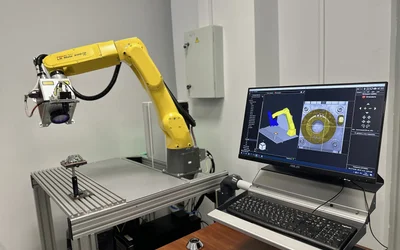
Researchers from ITMO University have created a multipurpose robot complex for laser treatment of medical device surfaces, like those of dental and skull implants. The designed technology can be utilized to imbue metal implants with antibacterial and biocompatible properties, as well as mark medical items. All one needs to do is load a 3D model of an implant into a program, set a processing trajectory, and pick a surface attribute of choice.
Watch How Flying Robots Like SKYRON Are Redefining Safety Checks at Sea
SKYRON's Cutting-Edge Solution Overcomes Hazardous Obstacles and Delivers Rapid Results
SKYRON marked history as the pioneer in contact-based NDT inspection on a massive offshore platform, setting a new standard for safety and efficiency.
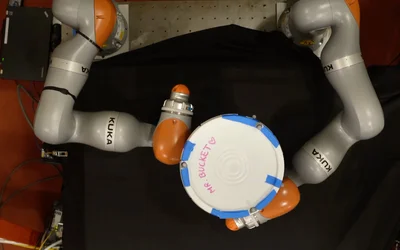
With a new technique, a robot can reason efficiently about moving objects using more than just its fingertips.
The Rotary Arm has the ability to attach to different surfaces shapes, vertical, horizontal, angular, and even curved surfaces.
2 minutes read
Discover How SKYRON Transforms NDT Practices for Safety and Efficiency Boost
First NON-entry confines space Ultrasonic Thickness inspection with an aerial robot.
3 minutes read
This guide delves into the basics and components of PID control, implementation, application examples, impacts, challenges, and solutions aiming to provide readers with a thorough understanding of this integral concept.