Improved Estimation and Control Algorithms for Quadcopter Applications
To satisfy the increasing requirements for speed and accuracy of Quadcopters, a Ph.D. student proposed novel designs and approaches in estimation and control algorithms.

23 Feb, 2022. 3 minutes read

Estimation and Control Algorithms for Quadcopter Applications
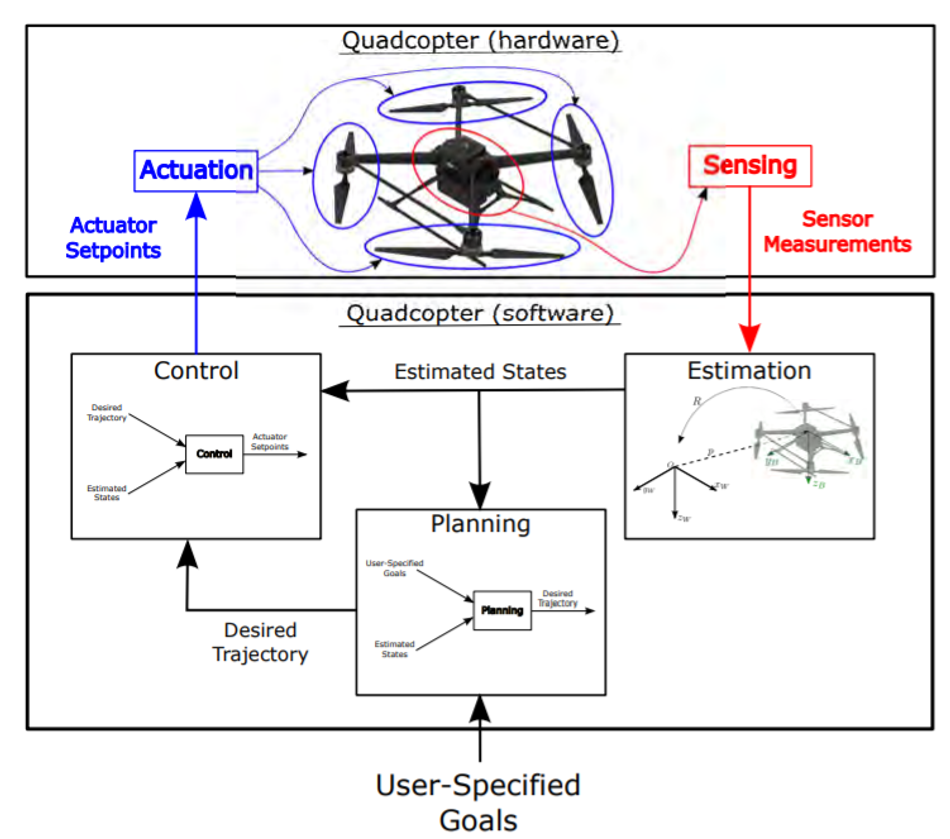
Because of the increased usage of quadcopters in consumer and industrial setups, unmanned aerial vehicles have demanded optimized algorithms and control systems to meet the required performance. As a part of the quadcopter structure, there are several components that make up the whole system: sensing, estimation, planning, control, and actuation. In terms of hardware structure, only sensing and actuation provides physical interaction with its surrounding environment as a part of the hardware. The rest of the components are responsible for handling the processing of incoming sensor information (estimation) and deciding the course of action (planning) based on the optimized approach (control). All of these components are taken care of by the custom software algorithms designed by the developer.
Estimation and control algorithms have played an important role in shaping the adoption of quadcopters for new applications, satisfying the increasing requirements for speed, accuracy, reliability and robustness. In order to provide a solution for these demands, we will discuss the research work presented by A.R.P. Andriën as a part of his Ph.D. thesis carried out at the Eindhoven University of Technology, done in collaboration with Avular, a mobile robotics company– under the research project “Drone Safety Cluster” sponsored by the European Union.
In estimation, the onboard sensors do not often provide accurate measurements of the desired states which requires combining several sensor information– processed using model information and providing an estimate of the actual state of the quadcopter. The estimation of the quadcopter is typically divided into two parts: (1) attitude and angular velocity estimation, and (2) position and translational velocity estimation. The attitude estimation for quadcopters is done using IMU-based sensors that include an accelerometer, gyroscope, and magnetometer. However, the angular velocity measurements of the gyroscope are combined with the vector-based measurements provided by the accelerometer and magnetometer using a complementary filter. For such a design approach, a cut-off frequency is set to a constant value depending on the noise characteristic of the vector measurements. Observing the noise characteristics of accelerometer and magnetometer as non-stationary values, a novel adaptation technique for a complementary filter is proposed. The author quotes, “the design of a new, adaptive, nonlinear complementary filter with a novel adaptation rule provides a more effective way of handling disturbances acting on the vector measurements.”
When it comes to estimating the position of the quadcopter, the hardware system usually employs external sensors like GNSS and UWB-based actuators. However, the availability and reliability of these sensors are questionable, such as the latency in providing data to the quadcopter and GNSS have more accuracy for outdoor settings than indoors. The existing solutions for estimating the optimal joint maximum a posteriori probability (JMAP) state and mode of Markov Jump Linear System (MJLS) are often stuck at the local minima. With this research article, A.R.P. Andriën proposes a novel approximate method that guarantees to be within a pre-specific bound for the optimal estimate. “Novel estimation and identification methods for computing joint maximum a posteriori probability estimates of the state and mode, as well as models of Markov Jump Linear Systems, are guaranteed to lie within a pre-specified bound of the optimal estimates,” the researcher explains.
The last challenge solved by this thesis is about computing fast and efficient landing trajectories for the quadcopter while avoiding the Vortex Ring State (VRS). A situation of fast vertical descent at low horizontal speed can result in high fluctuations making the quadcopter uncontrollable. Overall, the Vortex Ring State for quadcopters is designed to be time-optimal and energy-optimal vertical descent trajectories providing fast and efficient vertical maneuvers ensuring the safety of the quadcopter.
The research thesis is published under open-access terms in the Eindhoven University of Technology directory.
Reference
[1] Andrien, Alex Rudolf Petrus. / Optimization-based Estimation and Control Algorithms for Quadcopter Applications. Eindhoven: Eindhoven University of Technology, 2022. 160 p.