Featured
The optimization of manufacturing processes has become a priority for the vast majority of the automotive and aerospace industries.

The optimization of manufacturing processes has become a priority for the vast majority of the automotive and aerospace industries.
The optimization of manufacturing processes has become a priority for the vast majority of the automotive and aerospace industries.
The developments that took industrial robotics from automation to collaboration.
As the world becomes increasingly automated, the IoT (Internet of Things) is already transforming our domestic and business lives. Nowhere is this more apparent than in the use of AI and robotics in the manufacturing industry, with all the benefits offered by Industry 4.0.
This article provides a comprehensive technical comparison of CAN vs LIN, examining their architectures, use cases, and performance trade-offs.

Semiconductors
Nordic Semiconductor is a fabless semiconductor company specializing in wireless technology that powers the IoT.
181 Posts

Robotics & Automation
READY Robotics is a robotics software company that vastly simplifies robot ...
24 Posts

Automation Machinery Manufacturing
DEEPRobotics Technology Co., Ltd; leading the quadruped robots industrial a...
6 Posts
Perceived Barriers and Strategic Solutions for Implementation
SCANOLOGY's 6D Pose Tracking System transforms industrial robots into high-precision experts, enabling rapid calibration, real-time pose compensation, and accurate positioning—boosting efficiency, product quality, and reliability in advanced manufacturing environments.
Scanology AM-DESK and Elite Robots deliver a plug-and-play automated 3D inspection solution, combining precision, flexibility, and speed to transform quality control for modern manufacturing and empower truly smart, data-driven factories.
While a capable inspection robot can be costly, so is downtime.
Today's world is dominated by technology that uses either digital or analogue I/O modules to convert physical signals into digital format and vice versa. I/O modules, or input/output modules, are a mechanism by which information is communicated in electronic systems.
IAQ monitoring includes tracking PM, VOCs, NOx, CO₂, RH/T, and more. Sensirion's SEN6x, available through Mouser Electronics, integrates these sensing needs into a single module, reducing system complexity while enabling scalable, compliance-ready solutions.
Learn how compact methane sensors use TDLAS, 1.6 µm detection, and InGaAs photodiodes to deliver stable, repeatable sub-ppm CH₄ measurements in industrial environments.
The integrated design achieves accurate micro gas chromatography and can help reduce the cost of monitoring chemical synthesis, natural gas pipelines or at-home air quality.
The optimization of manufacturing processes has become a priority for the vast majority of the automotive and aerospace industries.

8 minutes read
The developments that took industrial robotics from automation to collaboration.
As the world becomes increasingly automated, the IoT (Internet of Things) is already transforming our domestic and business lives. Nowhere is this more apparent than in the use of AI and robotics in the manufacturing industry, with all the benefits offered by Industry 4.0.
The world is full of life-threatening jobs. There was a time when humans merely gritted their teeth, accepted the risk and trusted that the training they received would protect them from harm. However, there is a growing trend of using robots to do the tasks that could harm humans.

5 minutes read
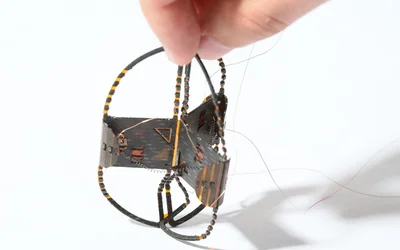
Meet Tribot, the three-legged origami robot designed and built by EPFL scientists. Tri- for three legs and -bot for robot, this super-light critter fits in the palm of your hand, is cheap to build, runs on less than one watt of power, and may one day be deployed in mass for search and rescue mission

Henrik Christensen shares his views on the impact of the robot revolution and stories from his life in European and US robotics research.
New “HAMR-E” robots could enable inspection of complex machines without dismantling them

5 minutes read
The impact of artificial intelligence within warehouses will act as a crystal ball for AI, robotics in other industries
In human-robot collaboration, human and machine work hand in hand. The human operator controls and monitors production, the robots perform the physically strenuous work. Both contribute their specific capabilities.
Decommissioning happens around us all the time, old buildings get torn down, coal power plants shutdown and vehicles get scrapped.