Motion Control in Robotics: 4 Types of Motors for Industrial Robots
Article #3 Robot Control Series. Motor control in robotics is increasingly complex, enabling a greater range of applications. But this also comes with the need for efficient and reliable data and power interfaces.
09 Sep, 2021. 5 minutes read

This is the third article in a 7-part series examining solutions for robot control. The series looks into solutions for power, data, and signal, necessary to push the role and capabilities of industrial robots. This series is sponsored by Mouser Electronics, an online distributor of electronic components. Through their sponsorship, Mouser Electronics is dedicated to sharing knowledge about the possibility of a greener, more reliable, and better-connected manufacturing future.
At the heart of every robot’s design is the physics of motion. How motion is accomplished, how it gets controlled with precision, how much energy it consumes, and how its optimal operating conditions are measured and maintained through sensors are key concerns for any robotic engineer. The achievement of motion depends on the type of motor used. This holds across a variety of robotic functions, from pick-and-place to paint application to materials handling.
Engineering teams integrating motors today are using increasingly compact designs, yet these designs combine more functions than ever. The internal data and power interfaces of motors must be connected quickly, reliably, and efficiently.
In this article, we take a look at the four main types of motors used in today’s smart factory robots.
Servo Motors
Servo motors are rotary or linear actuators that rotate and push parts of a machine with high levels of control and precision. Servo motors utilize a regular motor coupled with a sensor for positional feedback, and are part of a closed-loop system with a number of other components such as a shaft, control circuit, drive gears, and more.
Servo motors are becoming increasingly popular due to their high efficiency, especially in material handling systems and inside machinery. With the integration of controls, servo motors are progressively replacing hydraulic and pneumatic-driven systems.
Linear Motors
Linear motors are electric induction motors that produce motion in a straight line rather than rotational motion. In a linear motor, the stator (static part) is unwrapped and laid out flat. Instead of producing torque/rotation, it produces a linear force along its length.
Linear motors operate with an AC power supply and servo controller, which are often the same as those used for rotary servo motors. If you were to slice a rotary servo motor and lay it flat, you would essentially have a linear motor.
Linear motor systems meet the need for low friction and high flexibility. These motors can be found in a wide variety of applications and industries, from high-speed ground transportation to robotics to packaging applications. Linear motors may be used to actuate belt conveyors, shuttles in textile looms, and any other device requiring linear motion.
Spindle Motors
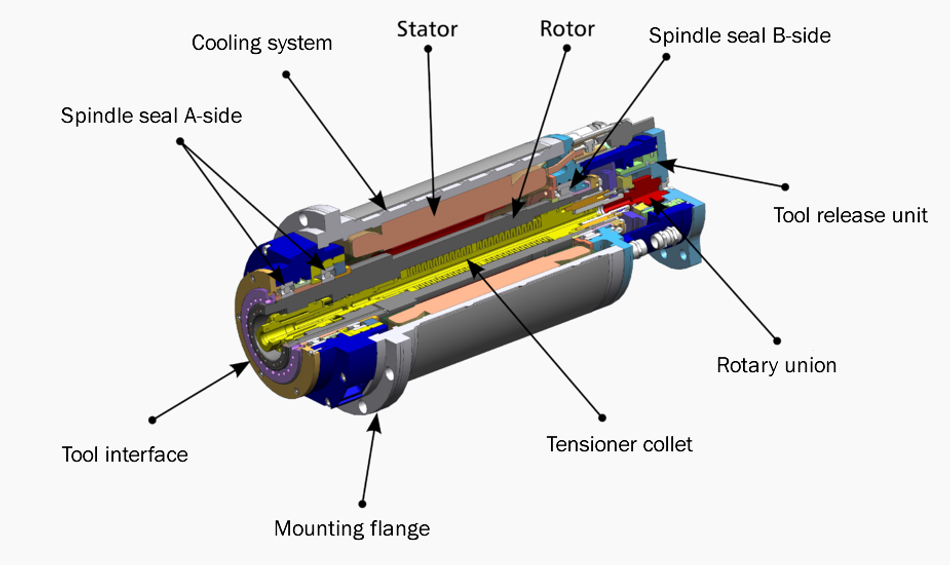
Driven by advancements in machine tools, which require high precision and reliability, spindle motors are becoming the heart of modern production systems. A spindle motor is a small, high-precision, high-reliability electric motor used to rotate a spindle (shaft). The design of the motor is usually a stepper motor with a hollow shaft, specially designed to absorb axial forces.
When it comes to robotic machining, spindles must be flexible, durable, and meet the payload limitations of the root. Robotic spindles are used in a variety of industrial applications, such as drilling/hole-making, milling, routering, engraving, grinding, deflating, buffing, and more.
Stepper Motors
Stepper motors are DC motors that divide a full rotation into a number of equal steps. One pulse causes the motor to increment one precise angle of motion. By energizing each step in sequence, the motor will rotate, one step at a time. Increasing the current or pulse increases motor torque, and the higher the step frequency, the higher the motor speed. The motor's position can be commanded to move and hold at one of these steps without any position sensor, as long as the motor is correctly sized to the application.
With digital, computer-controlled stepping you can achieve very precise positioning and/or speed control. For this reason, stepper motors are the motor of choice for many precision motion control applications.
Stepper motors have a long service life and are specially designed for applications requiring a high torque and low speeds. They are typically compact and lower cost, and offer precise positioning and speed control. Typical applications include 3D printers, indexing tables, camera platforms, and X, Y plotters. Today’s robots can integrate all of these subsystems, especially camera position systems for high-precision vision system controls.
Conclusion
When it comes to choosing a motor for your industrial robot, there is no one right answer, only what best fits the particular needs of your particular application. Your choice is going to be constrained by a number of factors, most importantly, the maximum torque the motor can deliver, the precision of the motor’s operation, and the minimum and maximum motor speed. Size, weight, cost, and numerous other considerations will also play a role.
In most cases, servo and stepper motors will likely be the most suitable choice. However, spindle motors will be necessary for many machining applications, and linear motors for processes requiring linear motion. Engineers have more choices than ever in ensuring reliable, and precise motion control for a wide range of industrial robots, machines, and applications.
This article was initially published by Mouser and TE in an e-magazine. It has been substantially edited by the Wevolver team and robotics writer Dillon Garrison. It's the third article of a 7-part series exploring solutions for robot control. Future articles provide an overview of servo motor connections, discuss the role of digital twins in robot connectivity and look at trends in manufacturing automation.
Article one looked at gains made by improved connectivity in industrial settings.
Article two looked at the quality of connectors for harsh environments.
Article three provided an overview of common motor types.
Article four listed 6 Connectivity Solutions For Industrial Robotic Applications.
Article five explores cobots and connectivity.
About the sponsor: Mouser Electronics
Mouser Electronics is a worldwide leading authorized distributor of semiconductors and electronic components for over 1,100 manufacturer brands. They specialize in the rapid introduction of new products and technologies for design engineers and buyers. Their extensive product offering includes semiconductors, interconnects, passives, and electromechanical components.