Featured
UAV technology continues to expand and become increasingly sophisticated.

UAV technology continues to expand and become increasingly sophisticated.
UAV technology continues to expand and become increasingly sophisticated.
Autonomous robotics must anticipate and plan for the unexpected, often in harsh, changing environments. We take a deep dive into these challenges by exploring design considerations beyond those associated with conventional PCBAs.
Innovative micro tunnel boring technologies are revolutionizing underground construction, setting new standards in efficiency and sustainability, and paving the way for future transformative infrastructure projects like the Hyperloop.
Unveiling the Duel of Digital Design - A Comprehensive Exploration of History, Syntax, and Applications of the two popular hardware description languages
16 minutes read.


Robotics and Drones
We empower R&D by providing the computational power, ROS packages, payloads & functionality for your unique use case.
14 Posts

Drone Fleet Management Software
Cloud Ground Control is a cloud based command and control solution for oper...
7 Posts
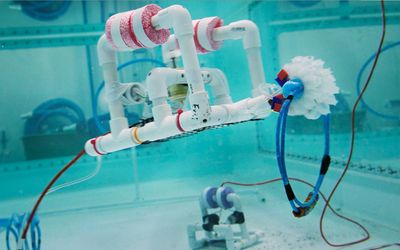
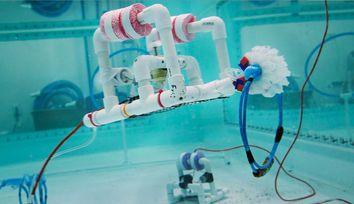
Launched by MIT Sea Grant, SeaPerch and SeaPerch II have had a big impact on young learners interested in ocean science and engineering.
How to Maximize Your Robot Without Blowing Your Budget
Discover how Deep Trekker rigorously tests and evaluates IMU technologies, comparing MEMS and FOG systems to ensure precise underwater navigation for ROVs.
Discover the vital role of underwater positioning in marine science, and how remotely operated vehicles (ROVs) are leading the way in location tracking.
Learn about Deep Trekker’s proprietary BRIDGE technology and how it enables you to control your Deep Trekker ROV from any device, and so much more.
Everything you need to know about Dead Reckoning for underwater navigation.
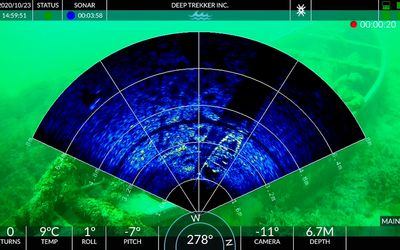
Learn more about what sonar is and its many uses. Read about its applications, technologies, principles, and more.
In this episode, we discuss how CalTech researchers have created bionic jellyfish to help us explore the oceans and better understand the impacts of climate change.
UAV technology continues to expand and become increasingly sophisticated.

4 minutes read
Autonomous robotics must anticipate and plan for the unexpected, often in harsh, changing environments. We take a deep dive into these challenges by exploring design considerations beyond those associated with conventional PCBAs.
6 minutes read
Innovative micro tunnel boring technologies are revolutionizing underground construction, setting new standards in efficiency and sustainability, and paving the way for future transformative infrastructure projects like the Hyperloop.
Discover how sonar makes search and recovery missions safer and more effective, and explore the benefits of integrating Deep Trekker ROVs with sonar.

11 minutes read
Learn more about what sonar is and its many uses. Read about its applications, technologies, principles, and more.
16 minutes read
Witness how SKYRON's advanced tech and rapid testing capabilities revolutionize ship inspections, ensuring thorough assessments in record time for ships returning to operations.

Learn about the software used by ROV companies. See how Deep Trekker uses its software to benefit the users of its products.
14 minutes read
In this episode, we discuss how CalTech researchers have created bionic jellyfish to help us explore the oceans and better understand the impacts of climate change.

16 minutes read
Discover how creating digital twins using ROVs enables efficient monitoring, and maintenance of underwater assets by exploring the capabilities of advanced modeling techniques.
10 minutes read
Drone delivery represents a significant technological advancement in logistics.
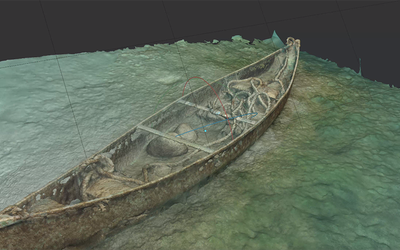
Discover how Deep Trekker ROVs are capable of conducting quality photogrammetry missions to create 3D models with unparalleled accuracy.
11 minutes read
Jellyfish can't do much besides swim, sting, eat, and breed. They don't even have brains. Yet, these simple creatures can easily journey to the depths of the oceans in a way that humans, despite all our sophistication, cannot.

4 minutes read
Unmanned and autonomous vehicles are transforming mobility across various sectors by attracting significant investment and promising economic growth, despite challenges in interoperability and customer adoption.
Discover how to find the best footage for your photogrammetry projects to create 3D models with unparalleled accuracy.
8 minutes read
A look at uncrewed vehicles' role in reducing greenhouse gas emissions with examples for forestry, ocean monitoring, and disaster relief.