Dead Reckoning 101: Everything You Need to Know
Everything you need to know about Dead Reckoning for underwater navigation.
03 Jul, 2024. 7 minutes read

DEep Trekker REVOLUTION ROV with SensorPod+ Sensor Fusion
This article was first published on
www.deeptrekker.comWhat is Dead Reckoning?
Dead Reckoning navigation, also known as "deduced reckoning," relies on the principle of estimating the current position based on the last known position, velocity, and heading. It involves using the direction and speed of movement to calculate where you are now relative to where you were previously.
Dead Reckoning is particularly useful in scenarios where GPS signals are unreliable or unavailable, such as underwater environments where GPS signals cannot penetrate. This method has been integral to navigation, serving as a reliable means of orientation when other references are unavailable or unreliable.
“Dead reckoning is quickly becoming our new favorite way to operate ROVs and understand positioning of our vehicles,” says Sam Macdonald, President of Deep Trekker. “Setting up USBL or flying completely blind is hard for us as users and our customers. We want to make the piloting experience as easy as possible.”

The Significance of Dead Reckoning in Underwater Navigation?
There are numerous challenges with underwater navigation. Unlike terrestrial or aerial navigation, where landmarks or satellites provide reference points, underwater environments offer minimal visual cues.
Factors such as fluctuating ocean currents, variations in water density, and unpredictable underwater terrain further complicate the navigation challenges. Without reliable navigation, underwater vehicles run the risk of veering off course, potentially endangering both the vehicle itself and any onboard equipment or personnel.
Navigating underwater environments poses distinct challenges, requiring specialized techniques like Dead Reckoning to ensure safe and efficient operations. Underwater navigation lacks prominent landmarks or GPS signals, making reliance on Dead Reckoning a key method for accurate positioning.
This method, reminiscent of long-standing historical navigation practices, becomes particularly important in underwater operations where traditional navigation aids like landmarks or celestial bodies are inaccessible.
Understanding and implementing Dead Reckoning involves leveraging advanced sensors and algorithms to mitigate inherent challenges, such as sensor inaccuracies and cumulative drift. As technology progresses, optimizing Dead Reckoning capabilities becomes pivotal for enhancing underwater navigation.

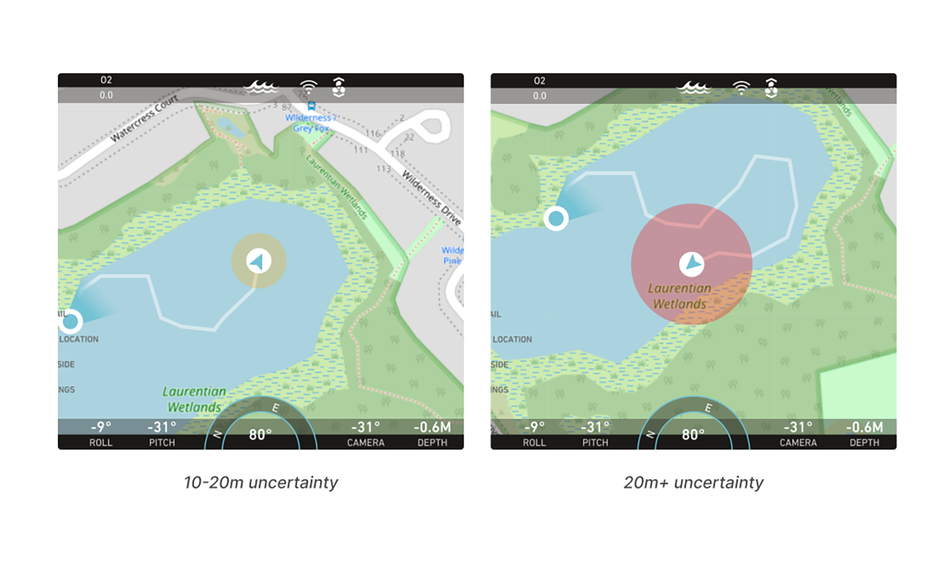
Deep Trekker’s PIVOT and REVOLUTION ROVs can operate with Dead Reckoning utilizing an upgraded inertial measurement unit (IMU) and Doppler Velocity Log (DVL) sensor combined with our BRIDGE software. The goal of these ROV systems is to simplify the experience so customers can input an initial position and then get in the water and go. That doesn’t mean there aren’t any best practices you can leverage to optimize your experience! Below are some tips and tricks to assist with your ROV piloting.
The 6 Rules of Dead Reckoning
The "6 Rules of Dead Reckoning" are guidelines used in navigation, particularly in maritime and aviation contexts, to ensure that an estimated position (Dead Reckoning position) remains as accurate as possible throughout a journey. These rules help navigators keep track of their position and make necessary adjustments. To effectively maintain the vessel’s Dead Reckoning position, the navigator should follow theses 6 rules:
1. Regular Position Updates: Update the Dead Reckoning position at regular intervals, typically every hour on the hour. This helps account for changes in speed, course, and environmental conditions that may affect the estimated position. This periodic recalibration is essential for compensating for sensor drift, especially prevalent in underwater technology. Manual recalibration or resurfacing with GPS helps in correcting any deviations and maintaining accuracy.
2. Adjustment after course changes: Following any alteration in the vehicle's course, promptly update the Dead Reckoning position to accommodate the modified trajectory. Utilize additional sensors such as a Doppler Velocity Log (DVL) sensor that tracks changes from the seafloor for underwater vehicles or Inertial Measurement Unit (IMU) sensors that track vehicle orientation changes to ensure alignment with the intended route.
3. Adjustment after speed changes: Whenever there is a change in the vehicle's speed, it's also important to update the Dead Reckoning position immediately to help ensure that the calculated position remains accurate, considering the altered velocity.
4. After every fix or running fix: A "fix" is a position obtained from external references, such as celestial observations, GPS, or terrestrial landmarks. A "running fix" is an ongoing series of fixes that helps refine the Dead Reckoning position. After obtaining either a fix or running fix, the navigator should update the Dead Reckoning position to incorporate this more accurate position information. In the case of an ROV, running fixes could be a GPS mounted on top that gets a fix whenever surfacing or a USBL getting pings during its dive. A fix also could be from a manual GPS input by the user when the ROV surfaces.
5. After plotting a single line of position: A line of position is a navigational line that represents the possible positions of a vehicle at a specific time. It is determined using observations of celestial bodies, radar ranges, or other means. After plotting a single line of position, the navigator should update the Dead Reckoning position to account for this new piece of positional data.
6. DR twice and label with Course and Speed: After every fix or running fix (repeated for emphasis). Reiterating the importance of updating the Dead Reckoning position after obtaining a fix or running fix. This ensures that the Dead Reckoning position continuously incorporates the most accurate position information available.

Fig. 1: Example of a Mercator chart style Universal Plotting Sheet used by the Navy for navigation.
Integration of Dead Reckoning with Other Navigation Techniques
While Dead Reckoning serves as a foundational navigation method and can be a standalone tracking method, its effectiveness can be amplified through integration with complementary techniques. By combining Dead Reckoning with other navigation methods, such as acoustic positioning systems and satellite-based navigation, navigators can enhance positional accuracy and resilience to environmental challenges.
Acoustic positioning systems, such as Ultra-Short Baseline (USBL), Short Baseline (SBL), and Long Baseline (LBL), provide precise localization capabilities by measuring the time of flight of acoustic signals between transponders and the vehicle. By incorporating acoustic position updates into Dead Reckoning calculations, navigators can refine their estimated positions and mitigate drift accumulation.
Similarly, satellite-based navigation systems, including GPS and GNSS (Global Navigation Satellite System), offer helpful external references for validating Dead Reckoning positions. While traditional GPS signals may be unavailable underwater, emerging technologies such as underwater GPS and Differential GNSS (DGNSS) enable precise positioning in submerged environments. By cross-referencing Dead Reckoning positions with satellite-derived fixes, navigators can ensure greater accuracy and reliability in their navigational estimates.
Furthermore, fusion algorithms, such as Deep Trekker’s Sensor Fusion algorithms, that integrate data from multiple sensors and navigation methods can optimize positional accuracy and robustness. By leveraging the strengths of each technique while compensating for their respective limitations, fusion algorithms provide a comprehensive solution for underwater navigation challenges.
The Role of Sensors in Dead Reckoning
Sensors play a significant role in Dead Reckoning by providing essential data inputs for calculating position estimates. Particularly in underwater navigation scenarios with ROVs, characterized by limited visual references, sensors serve as the eyes and ears of the vehicle, capturing crucial information about its movement and surroundings.
Various types of sensors are employed to track different aspects of the vehicle's motion. Doppler Velocity Log (DVL) sensors measure the vehicle's velocity relative to the seafloor by analyzing Doppler shifts in acoustic signals. This data is integral for calculating speed and direction changes, forming the basis of Dead Reckoning calculations. Additionally, Inertial Measurement Unit (IMU) sensors track the vehicle's orientation and angular velocity, providing necessary inputs for maintaining course accuracy.
Advancements in sensor technology, such as miniaturization and improved accuracy, have also enabled more sophisticated Dead Reckoning systems. MEMS (Micro-Electro-Mechanical Systems) sensors, characterized by their compact size and low power consumption, have become increasingly prevalent, offering a perfect blend of performance and efficiency for underwater navigation applications.
By leveraging the capabilities of these sensors, Dead Reckoning systems can navigate with improved precision, overcoming the challenges posed by the underwater environment and enabling safer and more efficient navigation.
Understanding the Limitations of Dead Reckoning
While Dead Reckoning serves as a valuable navigation technique, it is not without its challenges and limitations. Understanding these factors is important for mitigating risks and optimizing the performance of Dead Reckoning systems.
One notable challenge is the accumulation of errors over time, often referred to as "dead reckoning drift". This drift can arise from sensor inaccuracies, environmental disturbances, and uncertainties in the vehicle's dynamics. It’s important to note that these errors can compound, leading to considerable deviations from the true position, which is why periodic updates and recalibrations are so critical for maintaining accurate positional data.
Dead Reckoning is also susceptible to disruptions caused by external factors such as ocean currents, water density variations, and submerged obstacles. These dynamic environmental conditions can impede the vehicle's trajectory, making it challenging to maintain accurate position estimates.
Additionally, reliance solely on Dead Reckoning in scenarios with limited external references, amplifies the risk of navigation errors. In such cases, a single miscalculation or sensor malfunction could lead to navigation errors with potentially serious consequences.
Addressing these challenges requires a multi-faceted approach, combining robust sensor technologies, advanced algorithms, and strategic operational practices. By continually refining Dead Reckoning systems and incorporating complementary navigation techniques, such as Deep Trekker’s Sensor Fusion algorithms, operators can navigate with greater confidence and reliability in challenging underwater environments.
Dead Reckoning Empowering ROV Operations
Dead Reckoning is a fundamental navigation technique, offering a practical solution for navigating the intricate and often unpredictable underwater terrains encountered by ROVs (remotely operated vehicles) used for underwater operations.
By leveraging known parameters and updating positions in responses to changes in course and speed, Dead Reckoning provides a practical means of estimating positions where traditional navigation aids may be unavailable or impractical.
Its integration with complementary technologies such as acoustic positioning systems enhances its accuracy and robustness, making it a valuable tool for underwater operations and inspection tasks.
As advancements in sensor technology and navigation algorithms continue, Dead Reckoning holds promise as a dependable navigation technique for conducting essential vessel inspections with improved precision and efficiency, even in challenging underwater environments.
The Deep Trekker Advantage
Deep Trekker ROVs, engineered with rugged industrial-grade materials, are designed for versatility and durability. They offer immediate deployment and a comprehensive variety of advanced features. These ROVs are highly portable and quick to set up, featuring powerful LED lighting, a live 4K video feed, and up to 360-degree field of view, imaging sonar, and flexible sampling tools.
Our experienced team is at your service to offer expert guidance for a wide spectrum of applications, ranging from inspecting hull vessels to water tanks to conducting underwater assessments across various industries. We ensure tailor-made solutions that precisely match your specific requirements. When you're prepared to acquire your Deep Trekker ROV, don't hesitate to get in touch with us for a personalized quote.