Stepper vs Servo Motors: Mastering Motor Selection for Precision Engineering
In this article, we will delve into the key factors that differentiate stepper and servo motors, including their operating principles, torque characteristics, control methods, and suitability for different applications.

22 Sep, 2024. 19 minutes read
Electric Motors - AC Servo Motor, DC Brushless Motor, and Stepper Motor
Introduction
The selection of an appropriate motor for a specific application is crucial in engineering as it directly affects accuracy, speed, torque, and overall system responsiveness. Curious about stepper vs servo motors? Stepper motors, known for their discrete rotational movements, operate in fixed angular increments without feedback. In contrast, servo motors utilize closed-loop control systems, continuously adjusting their position based on feedback from encoders.
The decision of stepper vs servo motors involves considering factors such as positioning precision, dynamic performance, and control complexity. While steppers excel in open-loop positioning tasks, servos offer superior dynamic response and higher speeds. Understanding these differences is essential for engineers to optimize their designs, whether for industrial automation, robotics, or precision instrumentation. Let’s get into the basics of stepper vs servo motors, and discuss their operating principles, control methods, selection criteria, and suitability for different applications.
Decoding the DNA of Motion: Stepper and Servo Fundamentals
Stepper Motors: The Digital Precision Dancers
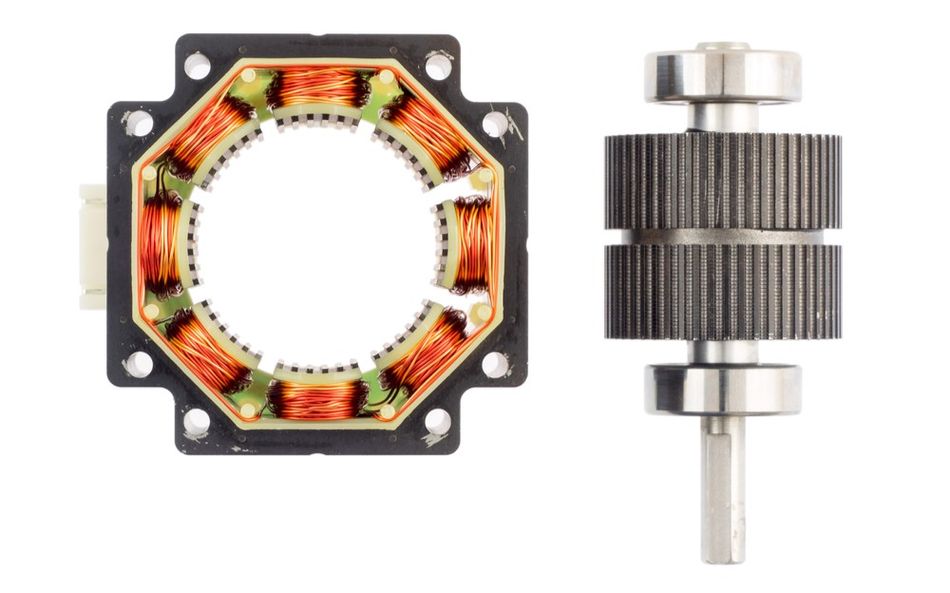
Stepper motors operate on the principle of electromagnetic attraction and repulsion. These brushless DC electric motors convert digital pulses into precise mechanical rotations, with each pulse corresponding to a fixed angular movement called a step. The rotor, typically a permanent magnet or soft iron core, aligns with the energized stator coils, creating motion in discrete increments.
Step angles play a crucial role in stepper motor precision. Common step angles include 1.8° (200 steps/revolution) and 0.9° (400 steps/revolution). [1] Smaller step angles offer higher resolution but may require more complex control systems. Microstepping techniques can further divide these steps, enhancing smoothness and resolution.
Stepper motors come in three main types:
Permanent Magnet (PM): Uses a magnetized rotor and operates with relatively low step angles.
Variable Reluctance (VR): Employs a soft iron rotor and offers high speed but lower torque.
Hybrid: Combines features of PM and VR types, providing high performance and small step angles.
Stepper motors can be classified as either bipolar or unipolar based on the configuration of their motor windings.
Bipolar Stepper Motors have a single winding per phase, requiring a more complex driving circuit to reverse the magnetic polarity. They generally offer higher torque, efficiency, and accuracy compared to unipolar motors.
Unipolar Stepper Motors have multiple windings per phase, with a center tap connection. This simplifies the driving circuit, making them easier to control but potentially reducing their torque and efficiency.

The choice of stepper motor type depends on the specific requirements of the application, considering factors such as required step angle, torque, speed, cost, and efficiency. Here are their basic differences:
| Characteristic | Permanent Magnet | Variable Reluctance | Hybrid |
| Step Angle | 7.5° - 15° | 5° - 15° | 0.9° - 5° |
| Torque | Medium | Low | High |
| Speed | Low to Medium | High | Medium to High |
| Cost | Low | Medium | High |
| Efficiency | Medium | Low | High |
Stepper motors offer several key advantages in precision engineering applications. These include:
Open-Loop Control: Stepper motors often operate in open-loop mode, eliminating the need for external feedback sensors to monitor their position. This simplifies the control system and reduces costs.
Step-by-Step Movement: The inherent step-by-step motion of stepper motors ensures precise positioning and control.
Magnetic Locking: Once energized, stepper motors exhibit strong holding torque, preventing unwanted movement or slippage. This is particularly beneficial in applications where maintaining a specific position is critical.
High Torque at Low Speeds: Stepper motors can deliver substantial torque even at low speeds, making them suitable for applications requiring high starting torque or precise control at slow speeds.
Simplified Control: The open-loop nature of stepper motors reduces the complexity and cost of the control system compared to closed-loop systems.
These characteristics make stepper motors ideal for applications requiring accurate positioning, such as 3D printers, CNC machines, and scientific instruments. The digital nature of stepper motors aligns perfectly with computer-controlled systems.
Servo Motors: The Analog Feedback Maestros
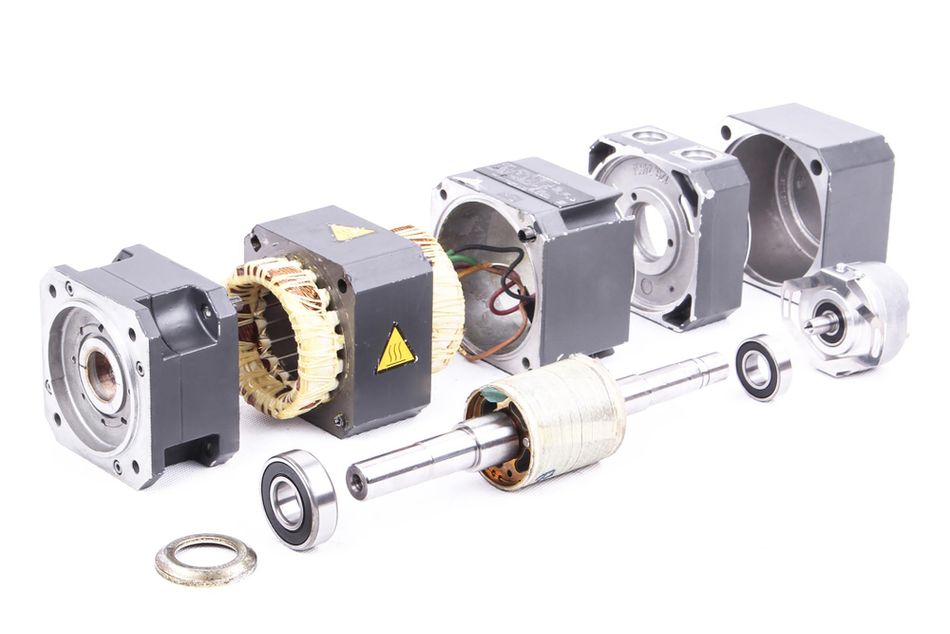
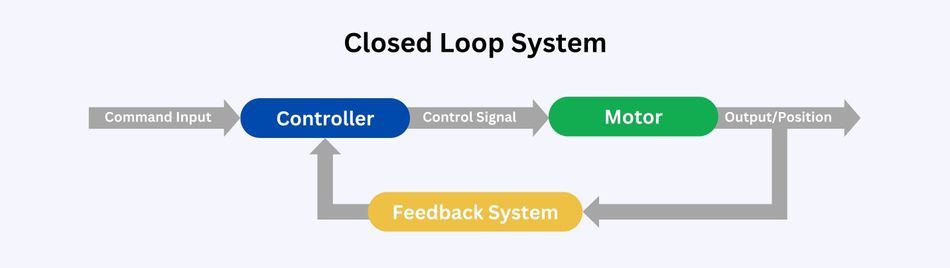
Servo motors operate on a closed-loop control system, continuously adjusting their position, velocity, and acceleration based on feedback. At their core, servo motors consist of a DC or AC motor coupled with a position sensor and a sophisticated control circuit.
The fundamental principle of servo motor operation revolves around the feedback mechanism. [2] An encoder or resolver attached to the motor shaft provides real-time position and velocity data to the control system. This feedback is compared to the desired position or velocity (the setpoint), and the difference (error) is used to generate a control signal that drives the motor to the correct position or speed.
There are two main types of servo motors:
AC Servo Motors are typically used in industrial applications due to their high power output, speed, and efficiency.
DC Servo Motors are more commonly found in smaller, battery-operated devices due to their lower power requirements and ease of control.
AC servo motors are further classified as:
Synchronous AC Servo Motors maintain a constant speed under varying loads and have a rotor that rotates in synchrony with the stator's magnetic field.
Asynchronous AC Servo Motors, also known as induction motors, have a rotor that rotates at a speed slightly slower than the stator's magnetic field. It allows the motor to generate torque through the interaction of the rotor and stator magnetic fields.
DC servo motors can be classified as:
Brushed DC Servo Motors uses mechanical brushes to switch the current in the motor windings.
Brushless DC Servo Motors uses electronic commutation, providing greater efficiency, reliability, and longer service life compared to their brushed counterparts.
Servo motors offer several key advantages in precision engineering:
High Accuracy and Repeatability: Servo motors, with their closed-loop control and continuous feedback, deliver exceptional precision and consistency in positioning.
Dynamic Performance: These motors excel in rapid acceleration and deceleration, making them ideal for applications demanding quick and responsive movements.
Load Resilience: Even under varying loads, servo motors maintain their position, ensuring consistent performance in dynamic environments.
Energy Efficiency: Operating efficiently across a wide speed range, servo motors optimise energy consumption.
Smooth Operation: Servo motors deliver smooth and precise movements, even at the slowest speeds, making them suitable for delicate applications.
These characteristics make servo motors ideal for applications requiring precise motion control, such as robotics, CNC machine tools, and automated manufacturing systems.
Recommended Reading: AC vs DC Motor: Unpacking Their Engineering Applications and Innovations
The Great Divide: Key Differences Between Steppers and Servos
Control Mechanisms: Open-Loop vs. Closed-Loop
Stepper motors typically operate in an open-loop control system. In this configuration, the motor receives command pulses that dictate the number of steps to rotate. The control system assumes the motor has reached the desired position based on the number of pulses sent, without any feedback mechanism to verify the actual position. This simplicity allows for cost-effective and straightforward implementation in applications where the load is predictable and consistent.
Servo motors, conversely, employ a closed-loop control system. This approach utilizes feedback from sensors, such as encoders or resolvers, to continuously monitor the actual position, speed, and sometimes torque of the motor. [3] The control system compares this feedback to the desired setpoint and makes real-time adjustments to minimize any discrepancies. This constant feedback loop enables servo motors to maintain high accuracy and adapt to changing loads or disturbances.
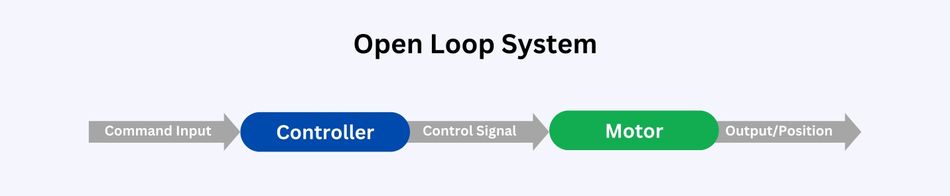
The open-loop control of stepper motors offers several advantages, including lower cost, simpler control circuitry, and inherent holding torque without power consumption. However, it can suffer from positioning errors due to missed steps under excessive load or at high speeds. Additionally, stepper motors may experience resonance issues and have limited high-speed performance.
Closed-loop control in servo motors provides superior accuracy, faster dynamic response, and the ability to handle variable loads. Servo systems can also operate efficiently across a wide speed range and provide precise torque control. However, these benefits come at the cost of increased system complexity, higher initial investment, and the need for tuning and maintenance of the feedback system.
| Characteristic | Open-Loop (Stepper) | Closed-Loop (Servo) |
| Feedback | None | Continuous |
| Position Verification | Assumed | Measured |
| Load Adaptability | Limited | High |
| Speed Range | Narrow | Wide |
| Accuracy under Load | Can Decrease | Maintained |
| System Complexity | Low | High |
| Cost | Lower | Higher |
| Efficiency | Lower at High Speeds | High across Range |
| Torque Control | Limited | Precise |
| Resonance Issues | May Occur | Rare |
The choice between open-loop and closed-loop control mechanisms depends on the specific requirements of the application. This includes precision needs, load variability, speed range, and budget constraints. Understanding these differences is crucial for engineers to select the most appropriate motor control strategy for their design challenges.
Torque Characteristics: Holding vs. Dynamic
Stepper motors exhibit a unique torque-speed profile that significantly influences their application in precision engineering. At zero speed, stepper motors demonstrate their maximum torque, known as holding torque. This characteristic allows stepper motors to maintain a fixed position without the need for continuous power consumption, ideal for applications requiring position retention under load.
Once the speed increases, the torque output of stepper motors decreases in a roughly linear fashion. This behavior is due to the step-by-step operation of the motor, where each step requires a finite time for the rotor to align with the stator's magnetic field.
Holding torque, a key feature of stepper motors is the maximum static torque the motor can exert when energized but not rotating. [4] This property is crucial in applications such as 3D printers, where the motor must hold a position against gravitational or other static forces. The high holding torque of stepper motors allows for precise positioning without the need for a brake or feedback system.
Servo motors demonstrate a different torque-speed characteristic. They maintain a higher torque output across a broader speed range. The dynamic torque capabilities of servo motors are superior to those of stepper motors, especially at higher speeds.
Servo motors can maintain significant torque output even as speed increases, suitable for applications requiring high-speed operation or rapid acceleration and deceleration. This characteristic is particularly valuable in robotics and machine tools where quick, precise movements are essential.
The torque-speed characteristics of these motor types significantly impact their selection for different applications.
Stepper motors are preferred in applications requiring:
High precision at low speeds
Strong holding torque without power consumption
Simple open-loop control in predictable load conditions
Servo motors are advantageous in scenarios demanding:
High dynamic performance across a wide speed range
Rapid acceleration and deceleration
Consistent torque output under varying loads
Engineers must carefully consider these torque characteristics when selecting motors for specific applications.
Precision and Accuracy: Steps vs. Continuous Motion
Stepper motors operate on the principle of discrete positioning. Each step corresponds to a fixed angular rotation, typically ranging from 0.9° to 1.8° per step in full-step mode. [5] This inherent discretization allows for precise open-loop control, where the motor's position is determined by the number of step pulses sent to it. Microstepping techniques can further divide these steps, increasing resolution up to 256 micro steps per full step, though at the cost of reduced torque.
Servo motors, in contrast, offer continuous positioning capability. They utilize a closed-loop control system with feedback from high-resolution encoders, allowing for infinitesimally small position adjustments. This continuous motion control enables servo motors to achieve smoother operation and more precise positioning, especially at higher speeds or under varying loads.
The accuracy and repeatability of both motor types differ significantly:
| Metric | Stepper Motor | Servo Motor |
| Positioning Resolution | 0.9° to 1.8° (Full Step) | <0.001° (Encoder Dependent) |
| Accuracy (Unloaded) | ±5% of Step Angle | ±0.1% of Full Range |
| Repeatability | Excellent (±0.1 step) | Very Good (±1 Encoder Count) |
| Position Feedback | Not Required | Essential |
| Load Sensitivity | High | Low |
| Speed Impact on Accuracy | Decreases at High Speeds | Consistent across Speed Range |
Stepper motors excel in applications requiring high repeatability and precise positioning at low speeds or under constant loads. Their discrete nature makes them ideal for:
3D Printers: Precise control of extruder and bed movement
CNC Machines: Accurate tool positioning in milling and cutting operations
Camera Positioning Systems: Controlled panning and tilting in surveillance
Laboratory Automation: Precise liquid handling and sample positioning
The continuous positioning and adaptive control of servo motors make them useful in:
Robotics: Smooth, coordinated multi-axis movements
Packaging Machinery: High-speed, precise product handling and wrapping
Semiconductor Manufacturing: Ultra-precise wafer positioning and handling
Flight Control Surfaces: Continuous, responsive adjustment of aircraft flaps and rudders
Stepper motors offer excellent repeatability and simplicity in low-speed, consistent-load scenarios. On the other hand, servo motors provide superior accuracy and adaptability in dynamic, high-performance applications.
Recommended Reading: PID Controller & Loops: A Comprehensive Guide to Understanding and Implementation
Performance Showdown: Stepper vs Servo in Action
Speed and Acceleration: The Race for Efficiency
Stepper motors typically operate in a speed range of 0 to 2000 RPM, with optimal performance often below 1000 RPM. Their speed is directly related to the pulse frequency applied to the motor windings.
Servo motors, in contrast, can maintain high torque over a much wider speed range, often operating efficiently from 0 to 6000 RPM or higher.
Acceleration capabilities differ markedly between the two motor types. Stepper motors have limited acceleration due to their step-by-step nature and the inertia of the rotor. Rapid acceleration can cause missed steps, leading to positioning errors. Servo motors, with their closed-loop control and typically lower rotor inertia, can achieve much higher acceleration rates, often reaching full speed in milliseconds.
The impact of speed and acceleration on motor selection is significant:
For high-speed applications, servo motors are generally preferred due to their ability to maintain torque at higher speeds.
In applications requiring rapid starts and stops, servo motors excel due to their superior acceleration capabilities.
Stepper motors are often chosen for lower-speed applications where precise positioning is more critical than rapid movement.
Examples of applications where speed and acceleration are critical factors include:
Pick and Place Machines in Electronics Assembly: Servo motors enable rapid, precise component placement at high speeds.
Industrial Robotics: Servo motors provide the quick, coordinated movements necessary for tasks like welding or material handling.
CNC Machining Centers: While steppers are used in some applications, high-speed machining often requires servo motors for rapid tool changes and axis movements.
Conveyor Systems: Servo motors offer quick acceleration and deceleration for precise product spacing and sorting.
3D Printers: While many use stepper motors for their precision, high-speed industrial 3D printers may employ servo motors for faster print times.
The choice between stepper and servo motors in speed-critical applications depends on the specific requirements of speed range, and acceleration needs. This also includes the level of precision required at various operating speeds.
Power Consumption and Efficiency: The Energy Battle
Stepper motors typically consume power continuously, even when holding a position, as they require a constant current to maintain torque. This characteristic results in higher heat generation and lower overall efficiency, especially in applications with frequent stationary periods.
Servo motors, conversely, draw power proportional to the load they're driving. When holding a position, they consume minimal power, only enough to counteract external forces. This on-demand power usage contributes to higher energy efficiency in dynamic applications.
The impact of power requirements on motor selection is crucial, especially in battery-operated or energy-sensitive applications. Servo motors often prove more suitable for systems with frequent start-stop cycles or varying loads, while stepper motors may be preferred in applications requiring constant low-speed operation or where simplicity is paramount.
Let’s understand these differences:
| Metric | Stepper Motor | Servo Motor |
| Efficiency at Low Speed | 70 - 80% | 80 - 90% |
| Efficiency at High Speed | 50 - 60% | 85 - 95% |
| Standby Power Consumption | High | Low |
| Power Factor | Lower (0.5 - 0.7) | Higher (0.8 - 0.9) |
| Heat Generation | Higher | Lower |
| Energy Recovery | Not Available | Possible with Regenerative Drives |
Tips for optimizing power consumption in motor-driven systems:
Right Sizing: Select motors that closely match the required torque and speed profile to avoid oversizing and unnecessary power consumption.
Use of Regenerative Drives: Implement energy recovery systems for servo motors in applications with frequent deceleration.
Implement Sleep Modes: For stepper motors, use control systems that can reduce holding current during idle periods.
Consider Hybrid Solutions: Use stepper motors for low-speed, high-precision tasks and servo motors for high-speed, dynamic operations within the same system.
Utilize Advanced Control Algorithms: Implement field-oriented servo control motors to optimize efficiency across the operating range.
By carefully considering these factors, engineers can make informed decisions to balance performance requirements with energy efficiency in their motor-driven system designs.
Noise and Vibration: The Silent Performers
Stepper motors are known for their characteristic noise and vibration, primarily due to their step-by-step operation. As the motor moves through discrete steps, it produces a distinct "ticking" sound, which can become more pronounced at higher speeds. The abrupt nature of each step also generates mechanical vibrations, particularly at resonant frequencies. These vibrations can propagate through the system, potentially affecting precision and overall performance.
Servo motors, in contrast, typically operate more quietly. Their continuous rotation and smoother torque delivery result in less mechanical noise and vibration. The closed-loop control system of servo motors allows for precise adjustments, further reducing unwanted movements and associated noise. However, servo motors can produce high-frequency noise from their encoders and control electronics, which may be noticeable in quiet environments.
The impact of noise and vibration on motor selection is significant, especially in applications where acoustic performance or mechanical stability is crucial. Industries such as medical equipment, laboratory instrumentation, and consumer electronics often prioritize low noise and vibration characteristics in their motor selection process.
| Operating Condition | Stepper Motor Noise Level | Servo Motor Noise Level |
| Low Speed (< 100 RPM) | 50 - 60 dB | 40 - 50 dB |
| Medium Speed (100-500 RPM) | 60 - 70 dB | 50 - 60 dB |
| High Speed (> 500 RPM) | 70 - 80 dB | 60 - 70 dB |
| Acceleration/Deceleration | 65 - 75 dB | 55 - 65 dB |
| Holding Position | 40 - 50 dB | 30 - 40 dB |
Strategies for minimizing noise and vibration in motor-driven systems include:
Microstepping: Implement microstepping techniques for stepper motors to smooth out motion and reduce vibration.
Anti-Resonance Algorithms: Use advanced control algorithms to avoid operating at resonant frequencies.
Mechanical Damping: Incorporate vibration-absorbing materials and mounts to isolate motor vibrations from the rest of the system.
High-Quality Bearings: Use precision bearings to reduce mechanical noise and improve overall motor performance.
Harmonic Filtering: Apply harmonic filters to power supplies to reduce electromagnetic noise in servo systems.
By carefully considering these strategies, engineers can design quieter, more stable motor-driven systems that meet the demanding requirements of noise-sensitive applications.
Engineering in Motion: Applications and Use Cases
Stepper Motor Strongholds: Precision in Discrete Steps
Stepper motors excel in applications requiring precise positioning and repeatable motion control. Their ability to move in discrete, accurately defined steps makes them ideal for systems where exact positioning is crucial. 3D printers heavily rely on stepper motors for controlling the movement of print heads and build platforms. The discrete step nature of these motors allows for precise layer deposition, crucial for achieving high-resolution prints.
In CNC machines, stepper motors are preferred for their ability to provide accurate tool positioning without the need for complex feedback systems. The open-loop control of stepper motors simplifies the overall system design while maintaining high precision in milling, drilling, and cutting operations. This is particularly advantageous in smaller CNC machines where cost-effectiveness is a key consideration.
The semiconductor industry utilizes stepper motors in wafer handling and positioning systems. The high holding torque of stepper motors ensures stable positioning during critical processes like photolithography. In this application, the motor's ability to maintain position without power consumption is crucial for maintaining clean room conditions and reducing heat generation.
Key applications for stepper motors include:
3D printers: Extruder and bed movement
CNC Machines: Tool positioning
Medical Imaging Devices: Sample positioning
Camera Systems: Lens focusing and zoom control
Robotics: Joint control in pick-and-place operations
Textile Machinery: Thread tensioning and fabric feed
Scientific Instruments: Microscope stage control
The inherent digital nature of stepper motors aligns well with modern digital control systems, allowing for straightforward integration with microcontrollers and PLCs. This compatibility facilitates precise motion control in automated systems, where repeatable positioning is critical for component placement accuracy.
Servo Motor Specialties: Dynamic Control and Feedback
Servo motors excel in applications requiring precise speed control, high dynamic response, and adaptability to varying loads. In robotics, servo motors are essential for achieving smooth, coordinated movements across multiple axes. Their ability to rapidly adjust torque and speed based on feedback allows robotic arms to perform complex tasks with high precision and repeatability.
The preference for servo motors in automation originates from their superior performance in variable load conditions. This characteristic is crucial in manufacturing processes where consistent performance is required regardless of load fluctuations.
In the automotive industry, servo motors find extensive use in electric power steering systems. Their rapid response to driver input and ability to adjust assist levels based on vehicle speed ensure precise steering control. The closed-loop nature of servo systems allows for real-time compensation of external disturbances, enhancing vehicle stability and safety.
Key applications for servo motors include:
Industrial Robots: Articulated arms, SCARA robots
CNC Machine Tools: High-speed machining centers
Semiconductor Manufacturing: Wafer handling, Wire bonding
Aerospace: Flight control surfaces, Radar positioning
Medical Devices: Surgical robots, Imaging equipment
Renewable Energy: Solar tracking systems, Wind turbine pitch control
Furthermore, the energy efficiency of servo motors, especially at higher speeds, makes them suitable for applications with frequent start-stop cycles or continuous operation. This efficiency, coupled with their ability to recover energy during deceleration, contributes to reduced operating costs in industrial automation settings.
Recommended Reading: Solving Automotive Motor Control for Electric Vehicles
The Engineer's Compass: Selection Criteria for Motor Choice
Performance Requirements: Matching Motors to Missions
Analyzing and defining performance requirements for a given application is the crucial first step in motor selection. This process involves a thorough examination of the application's operational demands, environmental conditions, and system constraints.

Engineers must consider factors such as load characteristics, duty cycle, speed range, positioning accuracy, and environmental factors like temperature and humidity.
Key performance metrics to consider include:
Torque requirements (starting, running, and peak torque)
Speed range and variability
Positioning accuracy and repeatability
Acceleration and deceleration profiles
Duty cycle and operational lifetime
Environmental conditions (temperature, humidity, vibration)
Power source and efficiency requirements
Size and weight constraints
Noise and vibration limitations
Control complexity and feedback requirements
Translating application needs into motor specifications requires a systematic approach. For instance, if an application demands high torque at low speeds, a stepper motor might be preferable. Conversely, if consistent torque across a wide speed range is necessary, a servo system would be more appropriate.
Examples of how performance requirements lead to different motor choices:
3D Printer Extruder: Requires precise positioning at relatively low speeds. A stepper motor is often chosen due to its ability to provide accurate open-loop control and hold position without power consumption.
Industrial Robot Arm: Demands high dynamic response, varying motor speed and torque, and smooth motion. Servo motors are typically selected for their closed-loop control and ability to handle changing loads efficiently.
CNC Machine Tool: Needs high torque at low speeds for cutting operations and rapid traverses at high speeds. This application often uses a combination of stepper motors for auxiliary axes and servo motors for main cutting axes to balance precision, speed, and cost.
Solar Panel Tracking System: Requires slow, precise movement with high holding torque. Stepper motors are often chosen for their simplicity and ability to maintain position without continuous power input.
By carefully evaluating the performance criteria and utilizing tools, engineers can make informed choices that optimize motor selection for their specific applications. This ensures the best balance of performance, efficiency, and cost-effectiveness.
Cost Considerations: Balancing Budget and Performance
Stepper motor systems generally have lower initial costs compared to servo motor systems. The simplicity of stepper motor construction and their ability to operate in open-loop control systems contribute to this cost advantage. Servo motors, with their more complex design and required feedback mechanisms, typically come with a higher upfront investment.
Long-term cost factors play a crucial role in the overall economic assessment of motor systems. Maintenance costs for stepper motors are often lower due to their simpler construction and lack of feedback components. However, servo motors may offer better energy efficiency, especially in applications with varying loads or high-speed operations. This efficiency can lead to significant energy cost savings over time, particularly in high-duty cycle applications.
The cost-effectiveness of each motor type varies depending on the application:
For low-speed, high-precision applications with consistent loads, stepper motors often provide the most cost-effective solution due to their lower initial cost and adequate performance.
In high-speed or variable-load applications, the higher initial cost of servo motors may be offset by their superior energy efficiency and reduced wear, leading to lower long-term operational costs.
For intermittent-use or low-duty cycle applications, the lower initial cost of stepper motors may outweigh the long-term efficiency benefits of servo motors.
Let’s understand the key differences:
| Cost Factor | Stepper Motor | Servo Motor |
| Initial System Cost | Lower | Higher |
| Control System Complexity | Lower | Higher |
| Energy Efficiency | Lower, especially at High Speeds | Higher across Speed Range |
| Maintenance Frequency | Lower | Higher (Due to Feedback Components) |
| Replacement Parts Cost | Lower | Higher |
| Downtime Cost (if failure occurs) | Lower (Easier to Replace) | Higher (More Complex System) |
| Scalability Cost | Lower for Small Increments | Lower for Large Power Increases |
By carefully weighing these cost considerations, engineers can make informed decisions that optimize both budget and functionality in their motor-driven system designs.
System Integration: Compatibility and Control Complexity
Stepper motors generally offer easier integration into various systems due to their simpler control requirements. [6] They can be driven directly by digital pulses from microcontrollers or PLCs without the need for complex feedback mechanisms. This simplicity makes stepper motors suitable for applications where cost and ease of implementation are prioritized over high-performance dynamic control.

Servo motors, while more complex to integrate, provide superior performance in dynamic systems. Their integration typically requires closed-loop control systems with position feedback, often necessitating additional components such as encoders and servo drives.
Control system requirements differ significantly between the two motor types:
Stepper motors usually employ open-loop control, where the position is assumed based on the number of steps commanded. This approach is simpler but can lead to positioning errors if steps are missed due to overloading or resonance issues.
Servo motors require closed-loop control systems that continuously monitor and adjust the motor's position, speed, and torque. This complexity allows for precise control and rapid response to changing loads but demands more sophisticated control algorithms and tuning.
The choice between stepper and servo motors can significantly impact overall system complexity. Stepper-based systems are often simpler, requiring less sophisticated control electronics and simpler wiring. Servo-based systems, while more complex, offer greater flexibility and performance, particularly in applications with varying loads or high-speed requirements.
Let’s understand the key differences:
| Integration Consideration | Stepper Motor | Servo Motor |
| Control System Complexity | Low (Open Loop) | High (Closed Loop) |
| Feedback Mechanism | Not Required | Essential (Encoder/Resolver) |
| Driver Complexity | Simple | Complex (PID Control) |
| Software Integration | Simpler (Step/Direction Signals) | More Complex (Motion Profiles) |
| Tuning Requirements | Minimal | Extensive |
| Scalability | Limited by-step Resolution | Highly Scalable |
| EMI Considerations | Higher at High Speeds | Generally Lower |
Best practices for seamless motor integration in engineering projects:
Clearly define system requirements, including speed, torque, and accuracy across the entire operating range.
Consider the control system architecture early in the design process to ensure compatibility with the chosen motor type.
For stepper motors, implement micro-stepping techniques to improve resolution and reduce resonance issues.
When using servo motors, carefully select and tune the feedback system to optimize performance and stability.
Implement proper shielding and grounding techniques, especially for high-speed stepper motor applications, to minimize EMI issues.
Use simulation tools to model system behavior and optimize control parameters before physical implementation.
For applications with varying performance requirements, consider hybrid solutions that combine stepper and servo motors for different axes or stages.
Implement current control in stepper motor drivers to optimize torque delivery and reduce power consumption.
In servo systems, utilize advanced control algorithms such as feed-forward control to improve dynamic response.
Regularly calibrate and maintain feedback systems in servo motor setups to ensure long-term accuracy and reliability.
By carefully considering these integration factors and following best practices, engineers can optimize system performance while managing complexity and cost in their motor-driven applications.
Recommended Reading: What is PLC? An Integral Component of Industrial Automation
Conclusion
The choice between stepper and servo motors is a critical decision in precision engineering. Stepper motors excel in applications requiring precise positioning at lower speeds and costs. Servo motors are ideal for dynamic applications demanding high speed, accuracy, and adaptability. Engineers must carefully analyze application requirements, considering factors such as speed, torque, accuracy, load variability, and system complexity. The long-term implications of motor choice on efficiency, maintenance, and scalability should not be overlooked. By understanding the strengths and limitations of each motor, engineers can make informed decisions to optimize their designs and achieve the desired performance objectives.
Frequently Asked Questions
Q: What is the main difference between stepper and servo motors?
A: The main difference lies in their control systems. Stepper motors typically operate in open-loop systems, moving in discrete steps without feedback, while servo motors use closed-loop control with continuous feedback for precise positioning and speed control.
Q: When should I choose a stepper motor over a servo motor?
A: Choose a stepper motor for applications requiring precise positioning at lower speeds, where cost-effectiveness is important, and the load is relatively constant. They're ideal for open-loop control systems in devices like 3D printers and simple CNC machines.
Q: How do the torque characteristics of stepper and servo motors compare?
A: In speed-torque curves, stepper motors have higher initial torque but experience a significant drop-off as speed increases. Servo motors maintain a more consistent torque output across their speed range, making them better suited for high-speed or variable-load applications.
Q: What are the cost implications of choosing between stepper and servo motors?
A: Stepper motor systems typically have lower initial costs due to simpler construction and control requirements. Servo motor systems are more expensive upfront but may offer long-term cost benefits in energy efficiency and performance in certain applications.
Q: How does the integration complexity compare between stepper and servo motor systems?
A: Stepper motor systems are generally simpler to integrate, requiring less complex control electronics and wiring. Servo motor systems are more complex, requiring encoders, more sophisticated drivers, and tuning, but offer greater flexibility and performance in dynamic applications.
References
[1] Oriental Motor. Stepper Motor Basics [Cited 2024 September 15] Available at: Link
[2] Solo Motor Controllers. Servo Motor: Basics, Working Principle, Theory, and More [Cited 2024 September 15] Available at: Link
[3] Control. Feedback Control Techniques: A Look Into Servo Systems [Cited 2024 September 15] Available at: Link
[4] MPS. Stepper Motors Basics: Types, Uses, and Working Principles [Cited 2024 September 15] Available at: Link
[5] Haydon Kerk Pittman. Stepper Motor Linear Actuators [Cited 2024 September 15] Available at: Link
[6] Mechtex. Applications of Stepper Motor [Cited 2024 September 15] Available at: Link
in this article
1. Introduction2. Decoding the DNA of Motion: Stepper and Servo Fundamentals3. The Great Divide: Key Differences Between Steppers and Servos4. Performance Showdown: Stepper vs Servo in Action5. Engineering in Motion: Applications and Use Cases6. The Engineer's Compass: Selection Criteria for Motor Choice7. Conclusion8. Frequently Asked Questions9. References