Featured
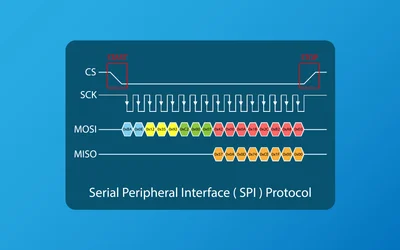
This article answers the practical question: how does SPI work, detailing the theory behind the bus, the role of each signal, timing modes, architectures and topologies, and practical design considerations.
This article answers the practical question: how does SPI work, detailing the theory behind the bus, the role of each signal, timing modes, architectures and topologies, and practical design considerations.
This article answers the practical question: how does SPI work, detailing the theory behind the bus, the role of each signal, timing modes, architectures and topologies, and practical design considerations.
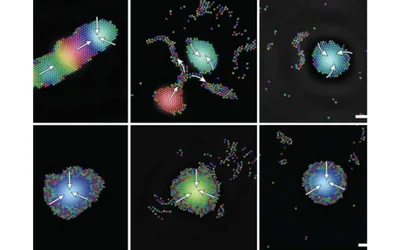
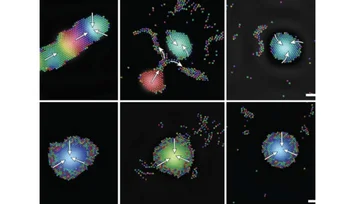
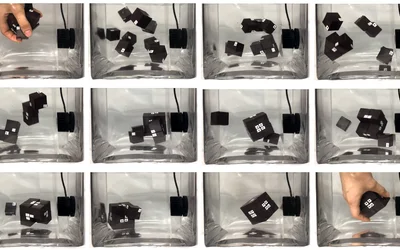
Microrobots modeled in simulations communicate via sound to form 'acoustic swarms' and move collectively
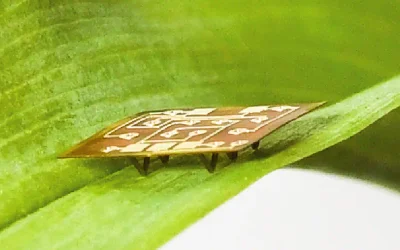
EPFL researchers are developing robotic beehive frames that help locate honey stores inside of beehives over time, without relying on cameras. The aim is to develop new observation tools to study honeybee behavior that better fit the bees' natural way to occupy space compared to current methods.
This article answers the practical question: how does SPI work, detailing the theory behind the bus, the role of each signal, timing modes, architectures and topologies, and practical design considerations.
17 minutes read.
Microrobots modeled in simulations communicate via sound to form 'acoustic swarms' and move collectively
EPFL researchers are developing robotic beehive frames that help locate honey stores inside of beehives over time, without relying on cameras. The aim is to develop new observation tools to study honeybee behavior that better fit the bees' natural way to occupy space compared to current methods.
Blackworms inspire collective behaviors for new robotic platform
'Link-bots' can move, explore, cooperate without sensing or computation
This article answers the practical question: how does SPI work, detailing the theory behind the bus, the role of each signal, timing modes, architectures and topologies, and practical design considerations.
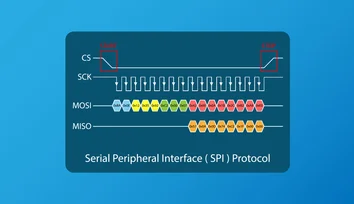
The Serial Peripheral Interface (SPI) protocol is a critical communication standard for high-speed data exchange in embedded systems. This article discusses its architecture, advancements, and practical applications in engineering to help engineers optimize and overcome design challenges.
This article answers the practical question: how does SPI work, detailing the theory behind the bus, the role of each signal, timing modes, architectures and topologies, and practical design considerations.
Microrobots modeled in simulations communicate via sound to form 'acoustic swarms' and move collectively

3 minutes read
EPFL researchers are developing robotic beehive frames that help locate honey stores inside of beehives over time, without relying on cameras. The aim is to develop new observation tools to study honeybee behavior that better fit the bees' natural way to occupy space compared to current methods.

3 minutes read
Blackworms inspire collective behaviors for new robotic platform

'Link-bots' can move, explore, cooperate without sensing or computation
3 minutes read
Researchers in the Department of Mechanical Engineering at Carnegie Mellon University have created the first legged robot of its size to run, turn, push loads and climb miniature stairs.

2 minutes read
InDro completes design, build and delivery of robots for swarm research.

6 minutes read
The Serial Peripheral Interface (SPI) protocol is a critical communication standard for high-speed data exchange in embedded systems. This article discusses its architecture, advancements, and practical applications in engineering to help engineers optimize and overcome design challenges.
Inspired by nature, architecture and swarm intelligence, two Princeton Engineering professors created a wall of robotic “flowers” that visitors interacted with during a recent exhibition.

In this episode, we interview Edward Mehr, CEO of Machina Labs, the ambitious startup that's transforming the manufacturing scene one robot at a time.

Imagine a world with precision medicine, where a swarm of microrobots delivers a payload of medicine directly to ailing cells. Or one where aerial or marine drones can collectively survey an area while exchanging minimal information about their location.

3 minutes read
In this episode, we talk about about how an ant inspired robotics platform could be the future of swarm robotics due to its simple, affordable, flexible, and scalable nature.
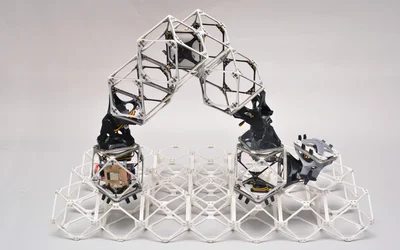
Researchers make progress toward groups of robots that could build almost anything, including buildings, vehicles, and even bigger robots.
While automated manufacturing is ubiquitous today, it was once a nascent field birthed by inventors such as Oliver Evans, who is credited with creating the first fully automated industrial process, in flour mill he built and gradually automated in the late 1700s.
Resilient robot teams juggle competing priorities without deadlock
3 minutes read