Featured
An autonomous robot – a base on wheels fitted with computer vision technology that snaps images of grapevines in near real-time – rolls down a long row of plants in a vineyard at Cornell AgriTech in Geneva, New York.

An autonomous robot – a base on wheels fitted with computer vision technology that snaps images of grapevines in near real-time – rolls down a long row of plants in a vineyard at Cornell AgriTech in Geneva, New York.
An autonomous robot – a base on wheels fitted with computer vision technology that snaps images of grapevines in near real-time – rolls down a long row of plants in a vineyard at Cornell AgriTech in Geneva, New York.
An AI team coordinator aligns agents’ beliefs about how to achieve a task, intervening when necessary to potentially help with tasks in search and rescue, hospitals, and video games.
Using a combination of machine learning and powerful X-rays, Cornell researchers have solved a mystery behind the unusual behavior seen in a class of materials with potential for thermoelectric energy conversion and other applications.
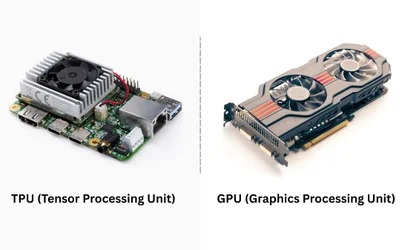
This article explores TPU vs GPU differences in architecture, performance, energy efficiency, cost, and practical implementation, helping engineers and designers choose the right accelerator for AI workloads today!
11 minutes read.
16 minutes read.
14 minutes read.
14 minutes read.


High Tech
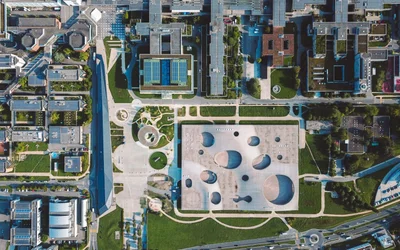
High Tech Campus Eindhoven is Europe's smartest square km and has the ultim...
49 Posts

University for science and technology
Freedom and individual responsibility, entrepreneurial spirit and open-min...
43 Posts
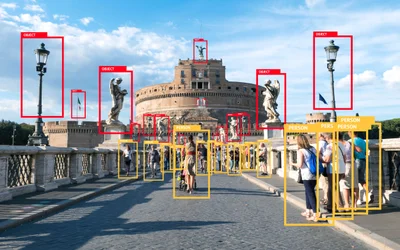
Understanding industrial vision systems by examining their components, imaging fundamentals, AI integration since 2020, and how to choose the right solution for every application.
Explore the rise of intelligent EV hardware and how real-time processing, ML acceleration, and hardware virtualization are enabling safer, smarter, software-defined electric vehicles.
A detailed engineering reference on performance, signaling, and power differences in current graphics memory standards.
Training AI models is costly, forcing a trade-off between compressing large models or accepting weaker performance from smaller ones trained from scratch.
With Xsens Indie Program
An autonomous robot – a base on wheels fitted with computer vision technology that snaps images of grapevines in near real-time – rolls down a long row of plants in a vineyard at Cornell AgriTech in Geneva, New York.

5 minutes read
An AI team coordinator aligns agents’ beliefs about how to achieve a task, intervening when necessary to potentially help with tasks in search and rescue, hospitals, and video games.
Using a combination of machine learning and powerful X-rays, Cornell researchers have solved a mystery behind the unusual behavior seen in a class of materials with potential for thermoelectric energy conversion and other applications.
2 minutes read
McKelvey’s Chien-Ju Ho working with Art & Sciences’ Wouter Kool, DCDS PhD student Lauren Treiman to understand how human behavior changes in training AI

3 minutes read
Moving Your ML Proof of Concept to Production Part 1: From Business Goals to ML Metrics
Researchers at Fraunhofer Institute have developed a free, online tool for testing the robustness of AI models

2 minutes read
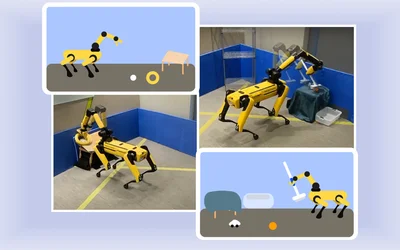
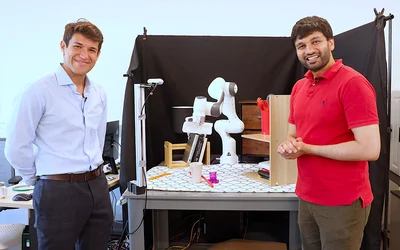
The phrase “practice makes perfect” is usually reserved for humans, but it’s also a great maxim for robots newly deployed in unfamiliar environments.
Researchers have developed a platform for the interactive evaluation of AI-powered chatbots such as ChatGPT.

4 minutes read
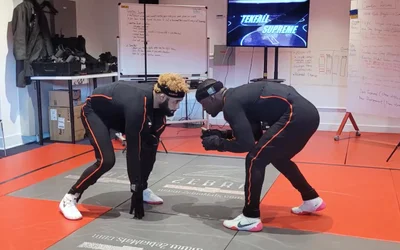
with Xsens motion capture

3 minutes read
The moonshot of many roboticists is cooking up the proper hardware and software combination so that a machine can learn “generalist” policies (the rules and strategies that guide robot behavior) that work everywhere, under all conditions.
MAIA is a multimodal agent that can iteratively design experiments to better understand various components of AI systems.
Even if you’re not very familiar with deep learning, you’ve probably heard about it and how it can, among other things, help automate the driving experience, increase manufacturing efficiency and change the consumer shopping experience.
Integrating AI and Digital Tools Beyond Digital Transformation.

6 minutes read
CUDA Cores and Tensor Cores are specialized units within NVIDIA GPUs; the former are designed for a wide range of general GPU tasks, while the latter are specifically optimized to accelerate AI and deep learning through efficient matrix operations.
Neural network controllers provide complex robots with stability guarantees, paving the way for the safer deployment of autonomous vehicles and industrial machines.