Featured
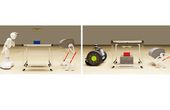
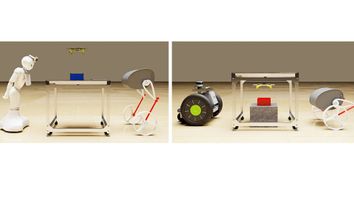
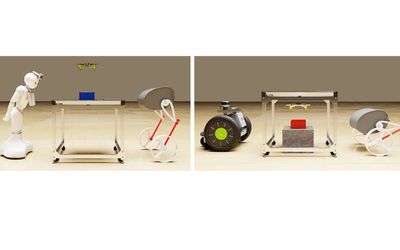
A team that included Chongzie Zhang from McKelvey Engineering developed a method that allows robots to teach other robots with different features to perform the same task.
A team that included Chongzie Zhang from McKelvey Engineering developed a method that allows robots to teach other robots with different features to perform the same task.
A team that included Chongzie Zhang from McKelvey Engineering developed a method that allows robots to teach other robots with different features to perform the same task.
Precision gears drive the performance of robotic systems. Find out how choosing the right gear design enables higher accuracy and long-term durability.
SCANOLOGY's 6D Pose Tracking System transforms industrial robots into high-precision experts, enabling rapid calibration, real-time pose compensation, and accurate positioning—boosting efficiency, product quality, and reliability in advanced manufacturing environments.
This article delves into what is a cobot, exploring its architecture, programming interfaces, control systems, safety protocols, intricate mechanics, and integration capabilities of modern cobots.
16 minutes read.
11 minutes read.

Robotics
To handle the rising global demand, companies necessitate individualized solutions which require increasingly complex production p...
1 Post

Industrial Automation
Guide your robot with Pickit 3D vision systems. Pickit is an ambitious scal...
Machinery Manufacturing
Automation and Robotics for Food, Bakery, Pet Food and Pharmaceuticals.

A team that included Chongzie Zhang from McKelvey Engineering developed a method that allows robots to teach other robots with different features to perform the same task.
Precision gears drive the performance of robotic systems. Find out how choosing the right gear design enables higher accuracy and long-term durability.
SCANOLOGY's 6D Pose Tracking System transforms industrial robots into high-precision experts, enabling rapid calibration, real-time pose compensation, and accurate positioning—boosting efficiency, product quality, and reliability in advanced manufacturing environments.
Scanology AM-DESK and Elite Robots deliver a plug-and-play automated 3D inspection solution, combining precision, flexibility, and speed to transform quality control for modern manufacturing and empower truly smart, data-driven factories.
A team that included Chongzie Zhang from McKelvey Engineering developed a method that allows robots to teach other robots with different features to perform the same task.

2 minutes read
Precision gears drive the performance of robotic systems. Find out how choosing the right gear design enables higher accuracy and long-term durability.
SCANOLOGY's 6D Pose Tracking System transforms industrial robots into high-precision experts, enabling rapid calibration, real-time pose compensation, and accurate positioning—boosting efficiency, product quality, and reliability in advanced manufacturing environments.

2 minutes read
Scanology AM-DESK and Elite Robots deliver a plug-and-play automated 3D inspection solution, combining precision, flexibility, and speed to transform quality control for modern manufacturing and empower truly smart, data-driven factories.
4 minutes read
This article delves into what is a cobot, exploring its architecture, programming interfaces, control systems, safety protocols, intricate mechanics, and integration capabilities of modern cobots.
In this blog post, we'll dive deep into cobots in manufacturing, exploring their various applications in manufacturing, their benefits, and how to seamlessly integrate them into your production line.

6 minutes read
In a world where industrial automation is happening at a fast rate, it is crucial to understand more about a cobot vs robot. There are over 3.4 million industrial robots being used in different industries today.
6 minutes read
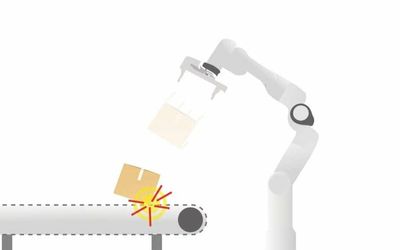
To achieve greater efficiency, robots must develop more human-like skills, such as fast physical interaction. That was the focus of the I.AM project.

4 minutes read
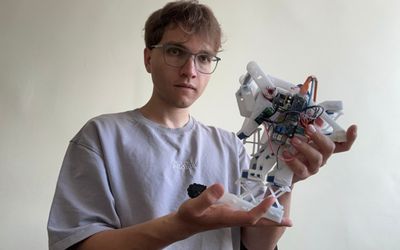
An ITMO PhD student has devised a way to design flexible robots capable of withstanding a shock load, retaining its energy, and adapting to movement on rough surfaces. The new robot’s joints are connected by flexible hinges rather than turning kinematic pairs.

3 minutes read
In this guide, we'll comprehensively address these questions. We'll delve into what cobots are, their various types, how they compare to industrial robots, their benefits, and more to assist you in understanding whether they might represent the future of technology.
6 minutes read
InDro completes design, build and delivery of robots for swarm research.

6 minutes read
Yiannis Kantaros will enable teams of robots to interact collaboratively, perceive and respond to their environment with a CAREER Award from the National Science Foundation
2 minutes read
Industrial robots have brought programmable automation to factory floors and areas for storage, sorting, and packing, as businesses seek to increase their productivity and reduce operating overheads.
More integrated, higher-performance microcontrollers (MCUs) enable higher power efficiency and smoother and safer motion with much higher accuracy, therefore increasing productivity and automation.

4 minutes read
In this episode, we talk about how a fashion company spun-off from MIT has developed the world’s first truly one-size-fits-all garment.

18 minutes read