Education robots, firefighting drones, and listening to wildlife: The latest entries in the Rock Engineering Challenge.
Entries to the ROCK Enginering Challenge are using SBCs to address challenges related to climate, education, and emergencies.

16 Feb, 2023. 8 minutes read
The Rock Engineering Challenge is open now until April 12th, 2023. It invites engineers, entrepreneurs, inventors, and developers to submit an idea for a part, product, or system that takes advantage of the ROCK single-board computers.
The first 500 valid entries will receive a ROCK board of choice.
Simply tell us what you are working on, and we'll send you a piece of cutting-edge hardware to bring your ideas to life.The most-cutting edge entry will be rewarded with a grand prize of a $50,000 partnership with electronics company OKdo to scale up their project idea.
We have been receiving exciting entries from all over the globe and have selected a few to highlight the broad applications of the ROCK family.
Patrick Whetman
Intelligent Wildlife Species Detector

Microphones are used to capture audio data which is then processed using machine learning to identify the animal species, whether it be bird, bat, rodent, whale, dolphin or anything that makes a distinct noise. The key advantage over other existing technology is that: the audio data is filtered at source, saving both disc space and human intervention. Previously recordings could easily generate many hours of footage per day, consuming up to 5 Gb per hour of disc space.
The applications for this include animal surveys, invasive species monitoring, and agriculture efficiency.

Soham Chakraborty
Battery management system

I am the Electronics Design Lead of TeamKART Motorsports, the Formula Student team of IIT Kharagpur. We are all set to make our first Formula Student Electric Vehicle this year. Our battery pack is a 100S5P of Molicel INR-21700 P42A cells. It is divided into five segments of 20S5P. The battery pack is designed to be 81 kW peak power, 420 Ah capacity, 350V, 250A discharge current, and 20 A charging current.
Lithium-ion cells require constant monitoring for proper charging/discharging. After looking at multiple off-the-shelf BMS, our team decided to make a BMS of our own. The BMS monitors every cell voltage and at least 30% of the cell temperatures., in compliance with the FSAE rules. The designed BMS should provide additional protection to the cells during charging and discharging by using passive cell balancing controlled by the BMS onboard controller, which controls the bleed FETs.
The BMS will be organized in a master-slave architecture with five slave boards for the five segments of the battery pack. The master board will be connected via a CAN bus to the 5 slave boards and will perform State of Charge (SoC), State of Health (SoH), Range, and Power Estimations. It will also perform diagnostics on the battery pack to determine overtemperature, under-temperature, overcurrent, under-voltage, and overvoltage faults and would open the Accumulator Isolation Relays through a relay driver if the fault is critical.
Otherwise, in case of a non-critical fault, it would derate the system by communicating with the Vehicle Control Unit (VCU) over RS-232 or CAN. The master board also passes certain management commands to the VCU and its slave boards via CAN or RS-232, as applicable.
The master board also acts as a data logger for the BMS. It logs all cell voltages, temperature, segment currents, and pack current on an onboard micro-SD card. This data can be used for analysis and to design a better battery pack for the upcoming iterations of the car.
Each segment will contain 33 thermistors placed on the negative terminals of the cylindrical cells. The thermistors are optimally placed in the battery pack so that no cell can go undetected beyond the temperature threshold of 55 degrees (image attached). Each slave board contains 6 LTC6813 18-Cell Battery Stack Monitor chips for monitoring the 100 cells. LTC6813 communicates with the Rockchip by using an isoSPI interface. The LTC6813 implements passive balancing using external resistors and transistors to remove excess energy from the most charged cell. The BMS Slave contains 100 sets of the same components since each cell needs its own circuitry.
The BMS will have to deal with 500 voltage readings (with a precision of 2 mV), 165 temperature readings, and 6 current readings (5 x segment, 1 x pack). It will have to use this data to diagnose each cell and estimate SoC, Range, SoH, and power requirements. It is imperative to large a high main memory to perform these many operations. Rock 5B comes equipped with 8 GB LPDDR4x SDRAM which is ideal for dealing with the volume of data that comes through it.
The project would satisfy the following objectives:
• Build a custom BMS solution for TeamKART Motorsports
• Add a foundation for the state of charge measurements
• Reduce the number of wiring failure points
• Optimise for cylindrical 21700 cells
• Improve charge and balance time
• Add integrated temperature sensing board
• Improve overall system robustness
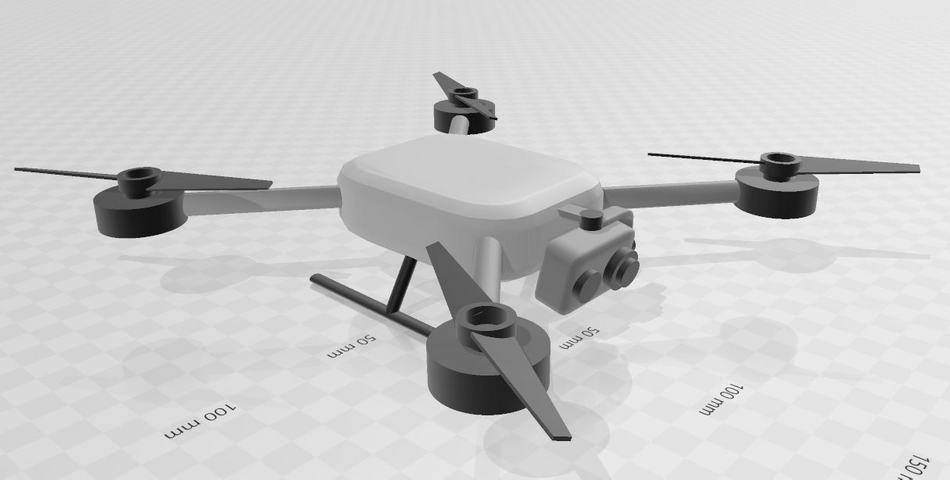
Jeffrey Higgason
Accessible drone technology

Our team at Charity 1.0 is a 501c3 non-profit that is looking to make technology accessible. Our first project- openSAR.net- aims to make drone technology easy and low-cost for first responders. We are currently working on an open-source indoor sUAS that uses ROS2 computer vision and lidar to map the environment and give advanced recon to unknown areas.
The structure core depth camera adds a real-time, 3D video feed based on depth data provided by the camera. This 3D view into a completely dark environment adds incredible reconnaissance and intelligence into an unknown world. The camera also allows for avoidance-based algorithms to make the drone incredibly easy to fly in a small area.
Later versions of our project plan on introducing a 360 lidar and 3D printed frame for the sUAS.
Based on our current research, cost-effective sUAS solutions do not exist that gather information and promote safer initial response efforts while providing valuable intelligence.
The project's primary objectives are:
• Design, build, test, and demonstrate sUAS solutions that address the primary need associated with flying a sUAS in an indoor and constrained environment.
• Develop innovative solutions that further enhance the first responder’s ability to gain situational awareness of the indoor environment.
• Develop a product at an affordable price that meets the budget of a public safety agency.
Use cases:
• Collapsed buildings
• Operations under dense canopies
• Indoor barricaded suspect
• Indoor hostage situations
• Indoor active shooters
• Structure fires
• Partially flooded buildings
Operating sUAS indoors in a constrained environment (e.g., limited lighting, compromised structural integrity, lack of global positioning system, or GPS-denied environment) presents many challenges for first responders who may be responding to an ongoing incident. Before inserting first responders into an unfamiliar environment, assessing the risks and obtaining better situational awareness could be critical to mission success and the safety of victims, survivors, bystanders, and first responders.
While there are sUAS solutions available in the market, these solutions typically cost more than what a local public safety agency might be able to afford. Additionally, it may be too difficult to operate a UAS in a small room or building without visual line of sight (VLOS), autonomous capabilities, and additional sensors. Also, information provided to incident command may not have sufficient fidelity or interpretability to be actionable. The objective of this project is to provide user-friendly, affordable solutions for first responders to accomplish their missions involving indoor environments.
David Tischler
Running Edge Impulse on the Rock 5B
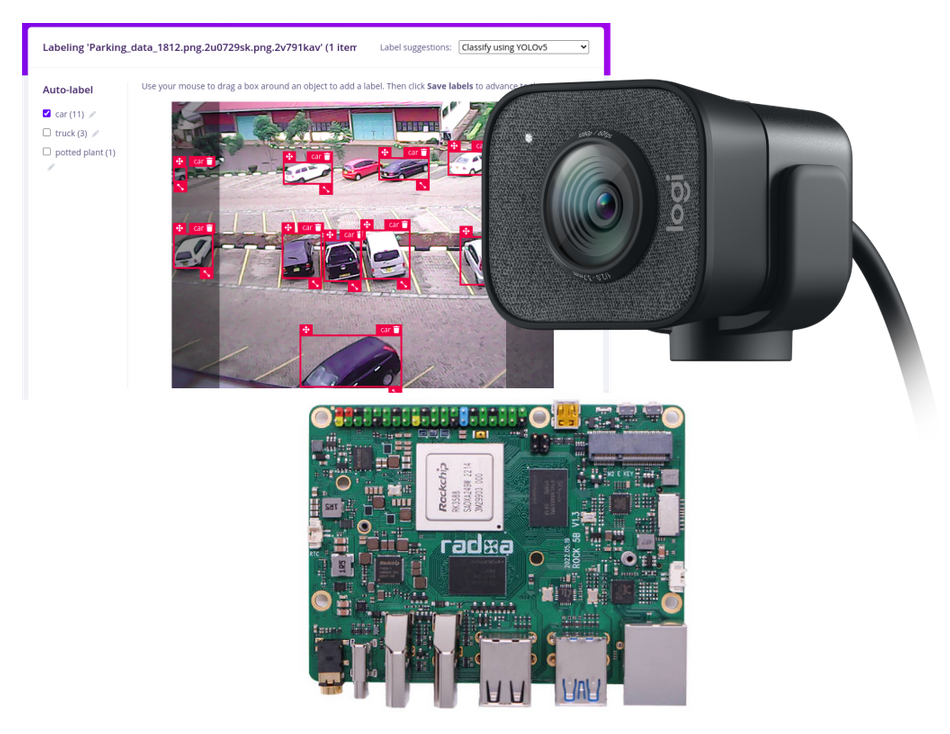
As the Community Developer Manager at Edge Impulse, I would like to demonstrate the Rock 5B running an Edge Impulse machine learning model!
I suspect that for now, we will need to simply use the CPU (which is of course very powerful anyways) to run our Linux CLI and perform inferencing, as opposed to the onboard NPU. I took a look at the NPU documentation and software support, and it seems to be a bit thin at the moment, but perhaps it will improve in the future. If the Rock 5B does indeed work "normally" I can help craft some community documentation that shows users how to deploy their AI model to the Rock5B.
This proof-of-concept and enablement would allow other users to come along and build AI Gateways and other machine learning and computer vision product demonstrations, but the first step is this testing and deployment to ensure Edge Impulse can run on the device.
Allan Kantombera
Firefighters assistance drones
Using many small faster drones to assist firefighters and rescue people can potentially improve the current ways of dealing with fire and rescue operations. Small, fast drones could navigate a large building or area in just a few minutes. The proposed drone will be equipped with different sensors and cameras, enabling it to send live data that can help inform the decision-making process of first responders.
Thermal camera, the camera will help to identify where the fire is and make a map of the fire. It will also help to identify people in the building.
RGB cameras will identify people and others using objects and other appliable information.
The drone will also have high-accuracy GPS, which will help the firefighters easily locate a person when the drone has found him.
The drones will send real-time data to the control center so that they have a picture of the building during rescue and fire fighting. Firefighters will have a wearable device that will show the maps from the drones and their position.
All the drones will be connected to one computer through WiFi, and software will help in processing the information and sending back instructions to each drone.
Goren Gordon
Robot platform for education

We are creating a social robot platform for education. The platform aims to enable low socio-economic schools to build their own social robots, where we will provide high-end software. We will use the ROCK single-board computer as the robot's brain, enabling us to run highly sophisticated interactive software.
Our social robotic platform addresses the problem of delivering highly efficient, updated, and much-needed pedagogy to low-income schools.
By programming the social robot to be a teacher assistant and small group facilitator, we will enrich the educational experience of children of all ages. Our social robot platform has 6-degrees of freedom for human-like movement and an LCD screen to project facial expressions.
The ROCK single-board computer will also be connected to a camera, microphone, and speaker to enable an interactive experience that involves detecting facial expressions, poses, and speech. We have thus far used an external laptop for our robotic platform and are prepared to create a standalone version of our robot.
Do you have an idea of how to use the ROCK? The challenge is open to all OEM's, startups, research teams, and students working on innovative SBC applications.
How to Enter?
Submit your entry via this form. You will be asked for a comprehensive idea description, details of your team, and images or videos that support your idea. The challenge is open until April 12, 2023.
We can’t wait to see your entries!
About the sponsor: OKdo
OKdo is a brand delivering a unique combination of hardware, software, development, and manufacturing services to help customers turn their innovative ideas into commercial realities. The company has been endorsed by technology giants such as Arm, NXP, Broadcom, Intel, and SEEED. OKdo partners with different brands to bring the latest and most innovative IoT and SBC products to people around the world.
