Mega Scout
The MegaScout is designed to support a Scout robotic team as well as perform missions independently. Scout robots are small 40 mm×110 mm robots intended to function as an information gathering team in situations potentially dangerous for humans. The Scouts contain sensing equipment such as cameras and small low-power microprocessors for control. These robots are designed to be very small while containing as much sensing equipment and computational power as possible.


















Technical Specifications
| Length | 37 |
| Diameter | 13 |
| Weight | 12 |
| Top Speed | |
| Standard wheel | 5.3 |
| Balloon wheel | 7.2 |
| Sensors | |
| Batteries | 250 |
| Operational Lifetime | |
| Quiescent Mode | ~20 |
| Reconnaissance Mode | ~5/7 |
Overview
The Scouts contain sensing equipment such as cameras and small low-power microprocessors for control. These robots are designed to be very small while containing as much sensing equipment and computational power as possible.
Megascout
When supporting a Scout mission, the MegaScout can be equipped with command transmitters and video receivers to communicate with a host of smaller Scouts. The robot can then relay this information back to the base station, which increases the range of the Scout team. If communication back to the base station should fail, the MegaScout is also equipped with sufficient computing power to control the Scout team. The MegaScout can be equipped during a Scout mission with a suite of sensors that would be too large to be installed on the smaller Scouts.
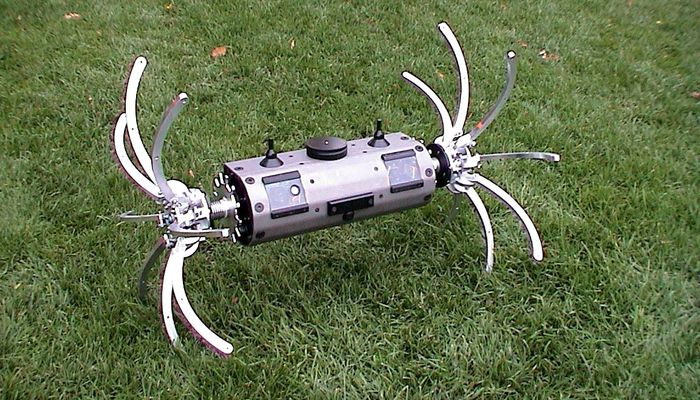
Mechanical design
The robot is designed to be used over a variety of different terrains including mud, dirt, and debris. This is possible because of the the minimization of entry points and the use of weather resistant features like gaskets and shaft seals. Bacause of its shell, all sensing to the outside world occurs through polycarbonate and other sensor transparent materials.
MegaScout has a titanium hull which provides a tough and lightweight exoskeleton that resists local deformation under impact conditions. Lightweight Fortal aluminum gearboxes and bulkheads are used to provide a rigid support structure. The wheels are mounted on hardened chrome alloy output shafts which are designed to resist severe impacts. A modular approach to the drive system allows for several types of wheels to be used and swapped.
The robot has two 150 W output motors which run at 42 V to avoid resistive losses associated with high power low voltage systems.
Software
The MegaScout is developed to operate as part of a heterogeneous robot team. For this reason, a generic software API was defined which allows command and control software to treat all individual robots as uniformly as possible. In the context of this API, a robot is modeled as a hierarchical collection of sensor and actuator objects, whose interfaces represent general types of robotic parts (motors, encoders, cam-eras, range finders, etc.) and whose implementations are left undefined. Concrete packages have been written to fill in all the implementation details necessary for the operation of the equipment on each MegaScout.
The exact composition of each robot is defined by an XML file that enumerates its sensory equipment and its mechanical actuators along with any configuration data needed for each part. A robot object is then assembled dynamically at runtime by parsing the XML description into a hierarchy of objects drawn from theselected component packages.
References
Describes the robot, related projects, the softwarem electronics, and mechanical hardware. Discusses future work and the conclusion.
This paper discusses the development of the communications system and a software architecture designed to allow the two Scout systems to work in autonomous cooperation.
Describes the project, and shows more video's of the technology, including video made with the MegaScout camera.
Recommended Specs



Continue Reading

Thanks to software developed bicycle engineers can quickly calculate the most aerodynamic shape for a bike. The software applies artificial intelligence to a set of user-defined specifications. Engineers have used the program to design a bike that they hope will break the world speed record.

3 minutes read

Designed using off-the-shelf parts, a low-cost microcontroller, and a 3D-printed chassis, the HeRo 2.0 robot costs just $18 to build — and is at the heart of an effort to open swarm robotics up to a broader audience.


A newly created real-life Transformer is capable of reconfiguring its body to achieve eight distinct types of motion and can autonomously assess the environment it faces to choose the most effective combination of motions to maneuver.

3 minutes read
