Kengoro
A musculoskeletal humanoid designed to achieve physically interactive actions in real world. This human mimetic robot that provides a high degree of anatomical fidelity to the human structure and is capable of whole-body motions. Kengoro is a 1.7-meter tall, 56-kilogram musculoskeletal humanoid and equipped with structural components, circuit boards, gears, and 108 motors.
Overview
This human mimetic robot that provides a high degree of anatomical fidelity to the human structure and is capable of whole-body motions.
Kengoro is a 1.7-meter tall, 56-kilogram musculoskeletal humanoid and equipped with structural components, circuit boards, gears, and 108 motors.
To cool the system the robot has a passive technique, allowing water to seep out through the frame around the motors to cool them evaporatively. With all the motors Kengoro has, there was no room for a cooling system, but this solution solved the problem that many humanoid robots encounter. Kengoro can run for half a day on a cup of deionized water, as just like humans it needs to keep hydrated.
Design
To develop a humanoid with human body proportions, the use of statistical data is important. Similar studies were conducted for the development of the HRP4 and HRP4-C humanoids. In our case, the design priority was to achieve bone lengths and limb shapes similar to those of humans. With this priority in mind, the components, muscle actuators, skeletal structure, and electrical components were designed and placed by trial and error.
The skeletal structure of the human mimetic humanoid was designed to imitate the skeletal shape, joint structure, and joint DOFs of humans. During the design process, we first studied human skeletal structures and extracted essential human skeletal mechanisms and functions that were considered useful for humanoids. Then, we simplified the biologically complex human joint structures into mechanical humanoid structures by extracting and focusing on certain functions.

**Figure 1: **Musculoskeletal Humanoid Kengoro with artificial perspiration cooling system.
In addition, we considered mechanical designs or elements that enabled us to realize the important functions. To develop a human mimetic humanoid with a human mimetic muscle arrangement, the humanoid should be equipped with as many muscle actuators as possible; however, trade-offs must be considered between the number of muscle actuators and the available design space. To overcome this challenge, we adopted a dense arrangement of muscle actuators. By modularizing the muscle actuators, we were able to effectively implement many muscles in the entire body.
Muscle insertion points of the humanoids are decided according to those of humans. However, a muscle expressed by a wire can only emulate just a point insertion, not regional attachment. Planar muscle is adopted to emulate regional attachment or multiple points to more correct emulation of the human.

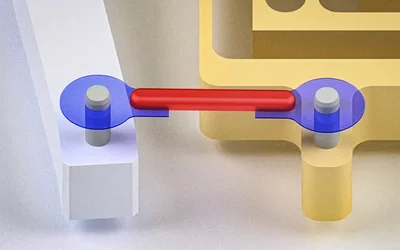
**Figure 2: **Overview of developed humerus. The white part represents the head of humerus that enables adhesion of muscles and bones. Printed aluminum has Bi-layer porous structure that enables 3 motors for deltoid to cool by latent heat.
A limitation of conventional humanoids is that they have been designed on the basis of the theories of conventional engineering, mechanics, electronics, and informatics. By contrast, our intent is to design a humanoid based on human systems to support science-oriented goals, such as gaining a deeper understanding of the internal mechanisms of humans, for instance, to quantitatively analyze the internal data of a human body in movement.
Human statistical data was used to create accurate humanoid proportions, both in terms of mass distribution and in the size of each body part. Furthermore, the skeletal structure and tendon-driven actuator systems mimic the connections made by muscles and tendons in the human body. Kengoro has 174 degrees of freedom, if you include all the joints in its hands.
The possibility that a musculoskeletal humanoid can be used in medicine, such as to grow tissue grafts has been suggested. If a humanoid can replicate human movements, then the resulting muscle contribution analysis or sensory data obtained during motion may also benefit athletes or sports trainers.

Figure 3: Conceptual diagram of the cooling system by latent heat using skeletal frame. The idea of latent heat effect is inspired from human sweat.
Another interesting application is active crash test dummies used during car crash testing, because current dummies can only measure passive behavior. A human mimetic humanoid enables the replication of human reflective behavior by muscle actuation.
Specifications
- Kengoro has 114 DOFs, which is 27% of the number possessed by humans and is the largest number of DOFs among life-sized humanoids.
- When hand DOFs are included, Kengoro is equipped with 174 DOFs. Multiple DOFs in its end effectors are considered the reason for the increased number of DOFs.
- In the entire body comparison, excluding the inner muscles of the human hand and foot, the muscle fidelity of Kengoro is 49.1%.
- Motors are brushless DC, and the output of those is 100 W for almost all muscles and 40 W for narrow parts of the body.
References
Provides detailed description of the Kengoro project; its goal, requirements, and design approach. Furthermore, detailed description of design & features, and specifications.
Overview and concept of the developed humanoid Kengoro and explains characteristics of skeletal structures. Muscle structure and control system are explained. Demonstrations of several preliminary movements by Kengoro to show its performances. Lastly the conclusion and future work is presented.
Describes studies of human foot structure for a human mimetic foot development and the hardware structure and muscle arrangement of the developed foot. Describes the balancing strategy utilizing the developed foot and demonstrates several experiments to show the performance of the foot. Also present
Recommended Specs



Continue Reading
The new design from MIT engineers could pump up many biohybrid builds.
Industry 4.0 is changing the traditional way that manufacturing and production are accomplished, and a positive turn towards clean energy means that more and better air-driven components are available.



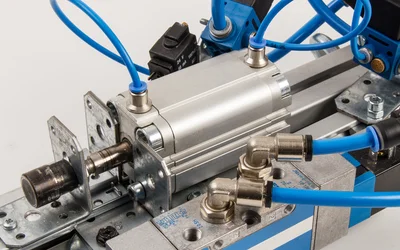
Pneumatic actuators convert compressed air into mechanical motion, enabling precise and efficient control in various industrial applications.
