Interbotix WidowX 250 6DOF
A mid-range robot arm from Interbotix X-Series Arms features 6 degrees of freedom, 250g payload, Dynamixel servos, and customizable end effectors suitable for education and research applications.
Technical Specifications
| Degrees of Freedom | 6 |
| Reach | 650mm |
| Total Span | 1300mm |
| Recommended Workspace | 910mm |
| Accuracy | 1mm |
| Working Payload | 250g |
| Weight | 6.2lbs |
| Min. grip width | 30mm |
| Max. grip width | 74mm |
| Power Supply | 12V5A |
| Total Servos | 9 |
| Joint | |
| Waist | Min: -180, Max: 180 |
| Shoulder | Min: -108, Max: 114 |
| Elbow | Min: -123, Max: 92 |
| Wrist Angle | Min: -100, Max: 123 |
| Forearm Roll | Min: -180, Max: 180 |
| Wrist Rotate | Min: -180, Max: 180 |
| DYNAMIXEL XM430-W350-T | |
| MCU | ARM CORTEX-M3 (72 [MHz], 32Bit) |
| Position Sensor | Contactless absolute encoder (12Bit, 360 [°]) |
| Motor | Coreless |
| Baud Rate | 9,600 [bps] ~ 4.5 [Mbps] |
| Control Algorithm | PID control |
| Resolution | 4096 [pulse/rev] |
| Backlash | 15 [arcmin] (0.25 [°]) |
| Gear Ratio | 353.5 : 1 |
| Stall Torque | 4.1 [N.m] (at 12.0 [V], 2.3 [A]) |
| No Load Speed | 46 [rev/min] (at 12.0 [V]) |
| DYNAMIXEL XL430-W250-T | |
| MCU | ARM CORTEX-M3 (72 [MHz], 32Bit) |
| Position Sensor | Contactless absolute encoder (12Bit, 360 [°]) |
| Motor | Cored |
| Baud Rate | 9,600 [bps] ~ 4.5 [Mbps] |
| Control Algorithm | PID control |
| Resolution | 4096 [pulse/rev] |
| Weight | 57.2 [g] |
| Gear Ratio | 258.5 : 1 |
| Stall Torque | 1.5 [N.m] (at 12.0 [V], 1.4 [A]) |
| No Load Speed | 61 [rev/min] (at 12.0 [V]) |
Overview
Robots’ accurate form grants them the capacity to do work precisely—a gift for humans as robots reduce the physical workload on top of precise and accurate outcomes. Some robots can recognize objects using Computer Vision and Artificial Intelligence, powered through machine learning and deep learning. AI, along with human direction, facilitates the robot experience. However, developing such technologies need certain machines for implementing codes and gathering data. Thus, requiring researchers to develop hardware and lower-level code for machine completion.
Belonging to the Interbotix X-Series family of arms is the WidowX-250 6DOF Robot Arm, which features Robotis’ DYNAMIXEL X-Series Actuators. This set of robot arms is a key addition to research facilities, classrooms, and laboratories. WidowX 250 6DOF is suitable for machine learning, vision-based pick and place, and artificial intelligence. It supports Moveit, MATLAB, Gazebo, ROS (Melodic and Noetic), demos, and instructional videos for education and research.
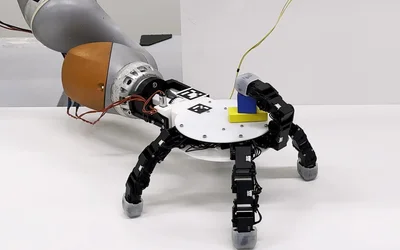
Design
WidowX 250 6DOF arrives fully assembled and fully tested, housed in an extremely rigid 20mm x 20mm extruded aluminum construction. The armrests on the industrial grade bearing for stability and accuracy. A transparent acrylic shield covers the electronics, freeing them from debris and impact coming from the arm itself.
6 Degrees of Freedom
WidowX-250 6DOF boasts 6 degrees of freedom coupled with a full 360-degree rotation. This number of DOF increases maneuverability. While the 6DOF arm can control every factor independently, at least one must be compromised with lower DOF arms.
Dynamixel Servos
Seven DYNAMIXEL XM430-W350-T servos combined with two DYNAMIXEL XL430-W250-T servos comprise the WidowX 250 6DOF. These servos provide high resolution at 4096 positions, definable PID parameters, positional feedback, and monitoring. Likewise, it makes voltage levels, compliance settings, and load accessible to the user.
The device achieves trajectory smoothing through the multiple registers in the smart servos, which set velocity setting, acceleration limits, fine-tuning, and PID gains. Meanwhile, DYNAMIXEL servos host low-level libraries, abstracting away serial communication layers—paving more higher-level coding time for developers.
Range & Payload
The robot arm has a horizontal reach of 650mm, measuring from base center to gripper for an overall span of 1300mm. The recommended workspace is 910mm at a working payload of 250g. This payload is the maximum weight for normal working circumstances defined as the arm's ability to lift objects repeatedly at about half its extension without failure.
U2D2 Controller & Power Hub Board
The heart of WidowX-250 6DOF is its DYNAMIXEL U2D2 from Robotis, enabling easy access to the Wizard software of DYNAMIXEL and ROS. The USB to TTL converter serves as the U2D2 controller, which allows DYNAMIXEL servos control via a computer. The 6 port 3-pin XM/XL power hub can split the DYNAMIXEL daisy chain into five separate chains while simultaneously powering them up. Likewise, the 2.1x5.5mm female barrel jack and screw terminals add more functionalities.
AprilTag
The visual fiducial system AprilTag is useful in various tasks, like robotics, augmented reality, and camera calibration. An ordinary printer can create the targets, allowing the AprilTag detection software to compute orientation, precise 3D location, and tag identities relative to the camera.
The C language implements the software library with no external dependencies. Its design targets easy inclusion in other applications and portability to embedded devices so that even cellphone-grade processors can achieve real-time performance.
3D Print Custom End Effectors
The X-series gripper carriages provide quick and easy changing of the fingers for various projects. The gripper’s minimum grip width is 30mm and a maximum of 74mm. CAD files for the grippers are downloadable, making customization endless so long as it is designable and 3D printable. The arm also includes a sticker-backed form for increased gripping strength and relieved stress on the servo.
Reparability
As a work-on design, the arm keeps the manipulator functioning—allowing easy swapping of motors and arm length adjusting. Parts for future repairs are also kept in stock to minimize downtime.
Optional Upgrade kits
Pre-configured with Ubuntu MATE 20.04, the RPI4/PS4 Bluetooth Control Set, ROS Noetic, and Interbotix PI ROS packages allow plug-and-play control of the X-Series arms. This option is available for users desiring remote control of the manipulator. The kit setup works with every Interbotix X-Series arm.
Adding the Intel D415 RealSense Depth Camera is the Vision kit upgrade. The upgrade also adds a camera stand and colored blocks meant to work with the vision-based ROS packages. The add-on enables features such as object sorting or tracking, pick and place, and detection.
Software
Every X-Series arm operates on a similar central open-source repository, which makes concept transfer over platforms easier. Several packages also ease working with the arm, like the ROS (Melodic and Noetic) and the ROS2 (Galactic, Humble, and Rolling). Such packages contain full meshes, simulation (Gazebo), motion planning (MoveIt), and URDFs—a driver node controlling the physical arm and publishing joint states. Meanwhile, IRROS, Interbotix Research Robotics Open Standard, allows smooth integration of lower-level actuator ROS wrappers into higher-level codes.
Additionally, the manipulation software MoveIt is free for commercial, industrial, and research, given its BSD license. On the other hand, Gazebo, free software in an active community, can accurately and efficiently simulate robot populations in complex environments. Lastly, MATLAB-ROS and Python-ROS APIs sit about the ROS layer, granting control of the arm despite lacking familiarity with ROS. Both APIs have the same functionalities for interacting with the arm kinematics, operating mode, and timing parameters, among others.
References
Recommended Specs



Continue Reading

Clone Robotics’ humanoid hand uses hydraulics to mimic complex human hand function.


Learn how Shadow Robot combines deep dexterous robotics expertise with transparent collaboration to move from concept to scalable manipulation systems.

A robotic hand developed at EPFL surpasses the limits of human dexterity with a dual-thumbed, reversible-palm design that can detach from its robotic 'arm' to reach and grasp multiple objects.

3 minutes read
