The 2023 Manufacturing Robotics Report: Robotic Projects and Tech Specs
A survey of impactful robotics projects.

17 Apr, 2023. 4 minutes read
Tags
The 2023 Robotics Manufacturing Report was created to enable you to be up to date, understand the complexity and depth of robotics, and to help you gain specific insights into the current status of robotics manufacturing.
Over the five articles of the report, we will examine the core technologies that make up a robotics project and shed light on the trends and challenges in creating them.
Read the introductory chapter here.
Read the full report now.
Robotics projects
Below we have selected a handful of projects demonstrating an emerging application and/or manufacturing method for robotics. As discussed in the introduction, robots are far from being part of factory floors but rapidly becoming visible, interactive, and necessary throughout daily life. Read an introduction to the projects below and more detail in the full PDF of the report.
Deep Robotics: Jueying X20
The Jueying X20 is a quadruped robot, designed and built based on user feedback from real-world application scenarios. Its robust “dog” design can be applied in search and rescue operations. Further, the company is developing coordinated multi-robot exploration that sees multiple robots deployed to work autonomously together on a single task.

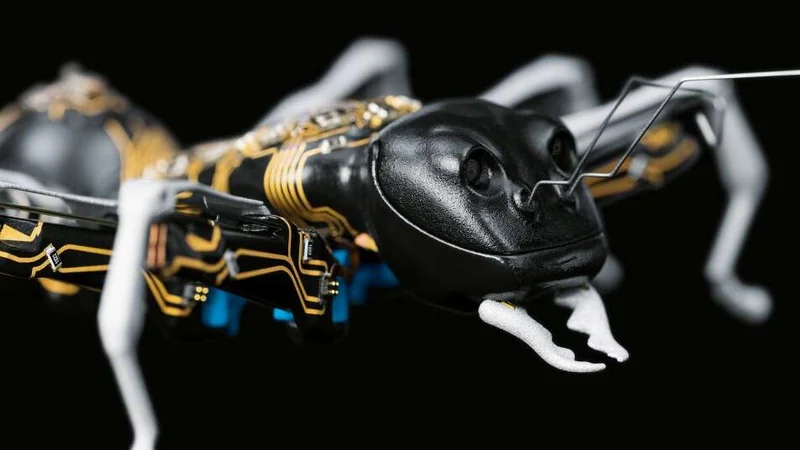
Festo: BionicANTs
Robotics company Festo, is combining selective laser sintering (SLS) with 3D moulded interconnect device (3D MID) technology to create experimental swarm robotics known as BionicANTs. The bodies of the BionicANTs are made of polyamide powder, which is melted layer by layer with a laser. 3D MIDs feature spatial conductive tracks, which are visibly attached to the surface of shaped parts and act as circuit boards for electronic and mechatronic subassemblies. They operate without any cables and only require a small amount of effort to be assembled. Well-known areas of application for MID technology are automotive, construction, medical and telecommunication engineering, and the aerospace industry. For the first time, Festo is producing miniature robots with the technology, the BionicANTs serve as a method for testing the cooperative behaviour of creatures transferred to the world of technology using complex control algorithms. Like their natural role models, the BionicANTs work together under clear rules. They communicate with each other and coordinate both their actions and movements. Each ant makes its decisions autonomously, but in doing so, is always subordinate to the common objective and thereby plays its part towards solving the task at hand.
In an abstract manner, this cooperative behaviour provides interesting approaches for the factory of tomorrow. Future production systems will be founded on intelligent components, which adjust themselves flexibly to different production scenarios and thus take on tasks from a higher control level. The BionicANTs demonstrate how individual units can react independently to different situations, coordinate with each other and act as an overall networked system. By pushing and pulling together, the artificial ants move an object across a defined area. Thanks to this intelligent division of work, they are able to efficiently transport loads that a single ant could not move.

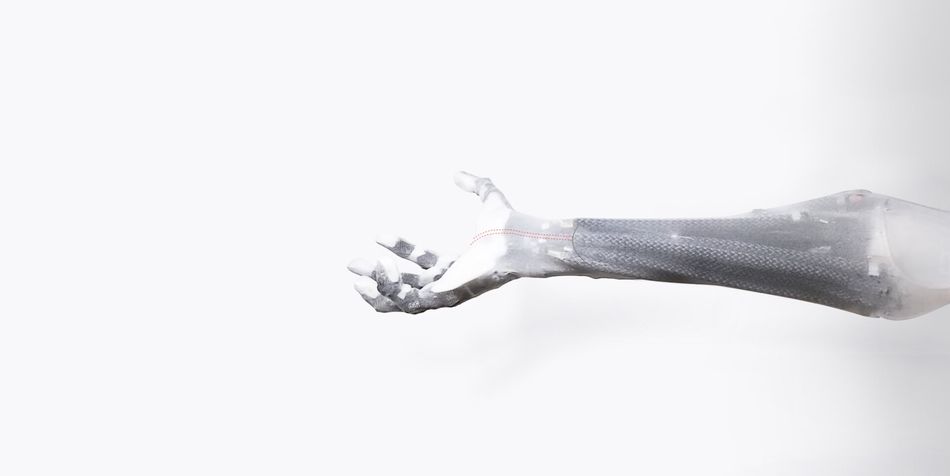
Clone Robotics: Clone Hand
Previously, humanoid type robots have been limited to applications related to entertainment, education and research. However, Polish startup Clone are looking to explore how super strong humanoid robots could be applied in environments unsafe for humans, which include nuclear waste facilities, wet labs, meat processors, space stations, and chemical plants.
They have currently developed the robot arm and hand and are working on building out the torso. What makes Clone special is the use of hydraulics to mimic the multi-articulation of human hands. Most macro-scale robots today, including those with anthropomorphic hands, use DC motors for actuation. While this may work for joints with three degrees of freedom, human-level hands require actuators that are far more robust to chaos in the environment. A general-purpose robot performing many tasks in a “chaotic” environment such as a human household will need to actuate its hands with a mechanism that can adapt to strong, random forces from the environment.
Carbon Robotics: Autonomous LaserWeeders
Carbon Robotics’ Autonomous LaserWeeders take the technology of machine vision from manufacturing and apply it to agriculture to create an autonomous bot-like robot capable of independently identifying and destroying weeds in crop conditions. The robot is designed for 24-hour use, contributing to increased crop yields and lower production costs. The robot has the traditional design of tractors and other agricultural equipment to meet the demands of the industrial agriculture environment.
Hello Robot: Stretch Robot
The Hello Robot Stretch Robot is a robot for researchers by researchers working on robotics projects that address care needs. Historically, versatile mobile manipulators have been large, heavy, and expensive. Stretch changes that. Thanks to its pared-down design, it performs a wide range of tasks in a simple, intuitive manner. The Stretch Robot is designed for autonomous operation. It comes with a calibrated robot model (URDF) that is aligned to 3D camera images and uses customizable open source calibration code in Python. ROS integration simplifies the use of existing ROS packages for autonomy, including the ROS navigation stack.

Read the full report now.
You can read the report, chapter by chapter, on Wevovler or get your digital copy of the full report below.
The 2023 Manufacturing Robotics Report
Introduction chapter: The 2023 Manufacturing Robotics Report
The 2023 Manufacturing Robotics Report: Materials
The 2023 Manufacturing Robotics Report: Robotic Projects and Tech Specs
The 2023 Manufacturing Robotics Report: Hardware
The 2023 Manufacturing Robotics Report: Manufacturing
Tags