Real-Time Traffic Monitoring with Neuromorphic Computing
Article #5 of Spotlight on Innovations in Edge Computing and Machine Learning: A computer vision project that monitors vehicle traffic in real-time using video inferencing performed on the Brainchip Akida Development Kit.

14 Sep, 2023. 13 minutes read

This article is part of Spotlight on Innovations in Edge Computing and Machine Learning. The series features some unique projects from around the world that leverage edge computing and machine learning, showcasing the ways these technological advancements are driving growth, efficiency, and innovation across various domains.
This series is made possible through the sponsorship of Edge Impulse, a leader in providing the platform for building smarter, connected solutions with edge computing and machine learning.
In the ever-evolving landscape of urban planning and development, the significance of efficient real-time traffic monitoring cannot be overstated. Traditional systems, while functional, often fall short when high-performance data processing is required in a low-power budget. Enter neuromorphic computing—a technology inspired by the neural structure of the brain, aiming to combine efficiency with computational power. This article delves into an interesting computer vision project that monitors vehicle traffic using this paradigm.
Utilizing aerial camera feeds, the project can detect moving vehicles with exceptional precision, making it a game-changer for city planners and governments aiming to optimize urban mobility. The key lies in the advanced neuromorphic processor that serves as the project's backbone. This processor is not just about low power consumption—it also boasts high-speed inference capabilities, making it ideal for real-time video inferencing tasks.
But the journey doesn't end at hardware selection. This article covers the full spectrum of the project, from setting up the optimal development environment and data collection methods to model training and deployment strategies. It offers a deep dive into how neuromorphic computing can be applied in real-world scenarios, shedding light on the processes of data acquisition, labeling, model training, and final deployment. As we navigate through the complexities of urban challenges, such insights pave the way for smarter, more efficient solutions in traffic monitoring and beyond.
Traffic Monitoring using the Brainchip Akida Neuromorphic Processor
Created By: Naveen Kumar
Public Project Link: https://studio.edgeimpulse.com/public/222419/latest
Overview
A highly efficient computer-vision system that can detect moving vehicles with great accuracy and relative motion, all while consuming minimal power.
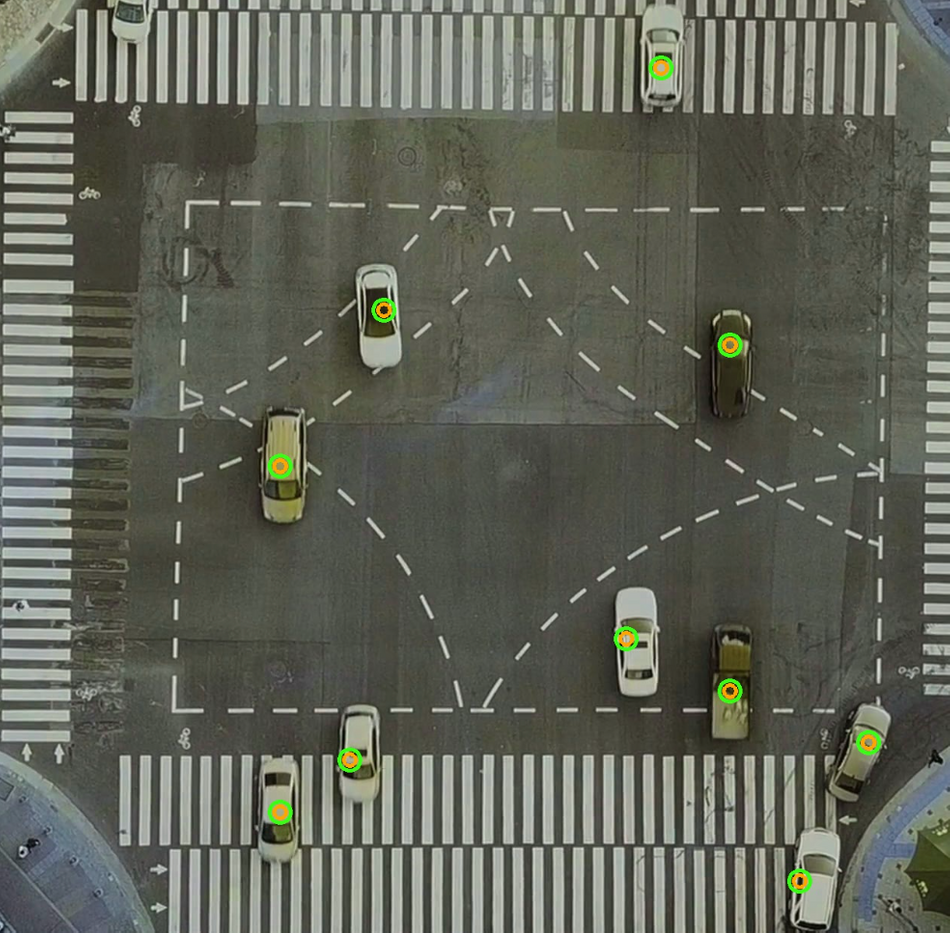
By capturing moving vehicle images, aerial cameras can provide information about traffic conditions, which is beneficial for governments and planners to manage traffic and enhance urban mobility. Detecting moving vehicles with low-powered devices is still a challenging task. We are going to tackle this problem using a Brainchip Akida neural network accelerator.
Hardware Selection
In this project, we'll utilize BrainChip’s Akida Development Kit. BrainChip's neuromorphic processor IP uses event-based technology for increased energy efficiency. It allows incremental learning and high-speed inference for various applications, including convolutional neural networks, with exceptional performance and low power consumption.
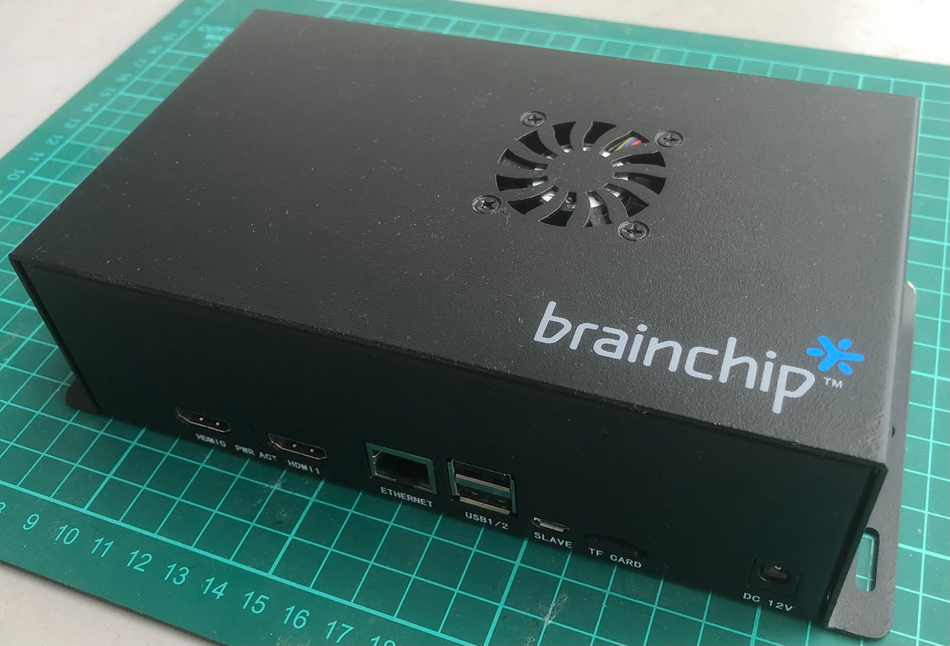
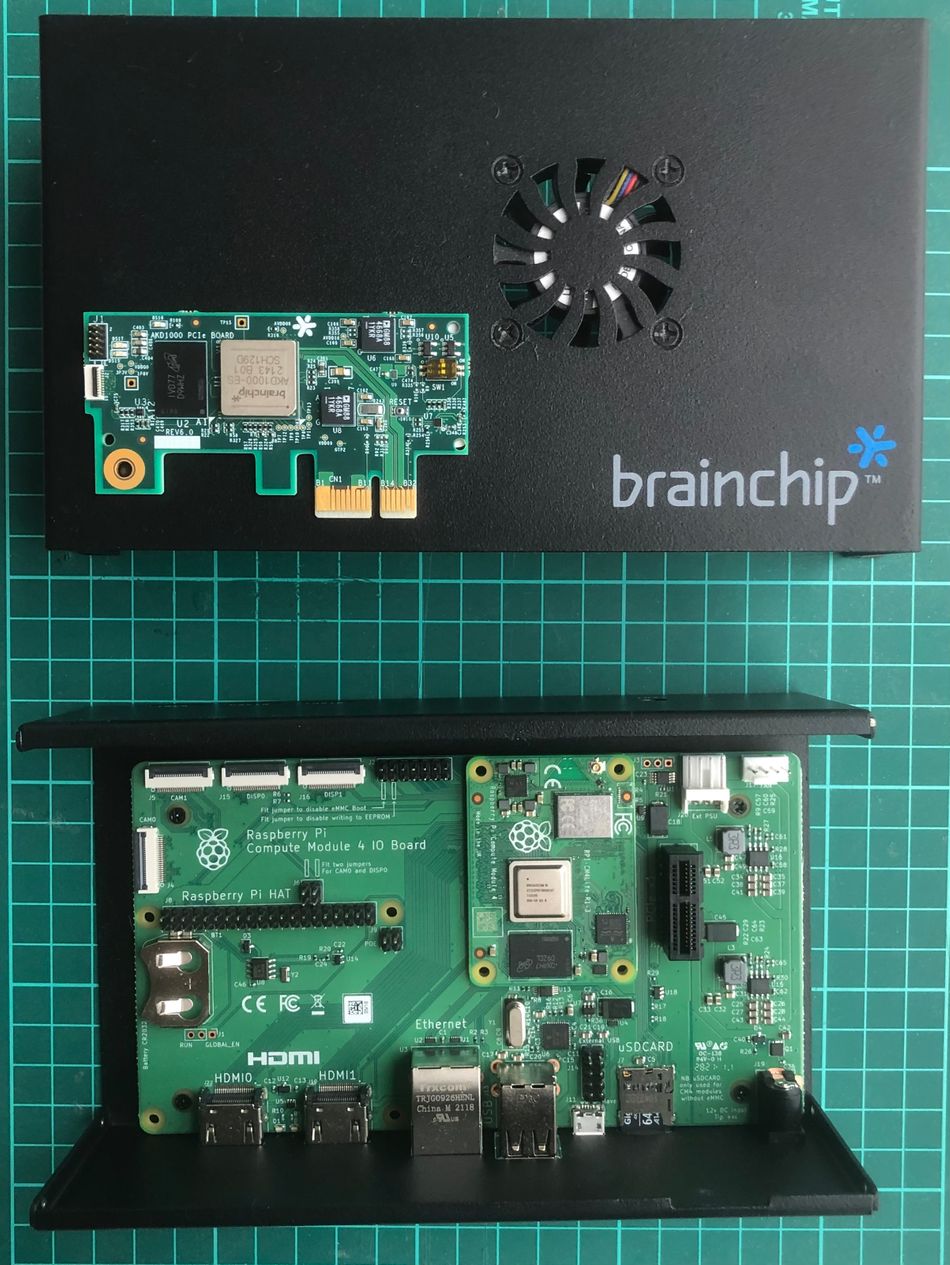
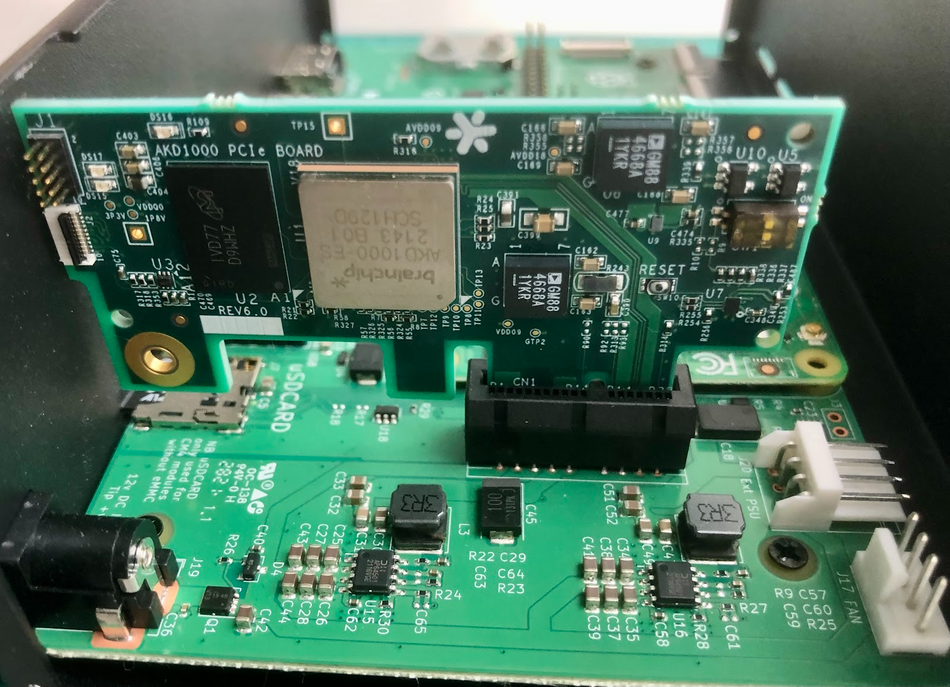
The kit consists of an Akida PCie board, a Raspberry Pi Compute Module 4 with Wi-Fi and 8 GB RAM, and a Raspberry Pi Compute Module 4 I/O Board. The disassembled kit is shown below.
Setting up the Development Environment
After powering on the Akida development kit, we need to log in using an SSH connection. The kit comes with Ubuntu 20.04 LTS and Akida PCIe drivers preinstalled. Furthermore, the Raspberry Pi Compute Module 4 Wi-Fi is preconfigured in Access Point (AP) mode.
Completing the setup requires the installation of a few Python packages, which requires an internet connection. This internet connection to the Raspberry Pi 4 can be established through wired LAN. In my situation, I used internet sharing on my Macbook with a USB-C to LAN adapter to connect the Raspberry Pi 4 to my Macbook.
To log in and install packages execute the following commands. The password is brainchip for the user ubuntu.
$ ssh ubuntu@<ip-address> $ pip3 install akida $ pip3 install opencv-python $ pip3 install scipy $ pip3 install Flask
Data Collection
Capturing video of moving traffic using a drone is not permitted in my area so I used a license-free video from pexels.com (credit: Taryn Elliot). For our demo input images, we extracted every 5th frame from the pexels.com video using the Python script below.
python
import cv2
import sys
if __name__ == '__main__':
video_path = './traffic-3840x2160-24fps.mp4'
videoCapture = cv2.VideoCapture(video_path)
if not videoCapture.isOpened():
logging.error("Cannot open video file")
sys.exit(-1)
i = 0
j = 0
while True:
ret, frame = videoCapture.read()
if ret:
img = frame[440:440+1280, 1280:1280+1280]
cv2.imshow('Frame', img)
i = i + 1
if i % 5 == 0:
j += 1
cv2.imwrite(f'./data/images/img_{j:04d}.jpg', img)
key = cv2.waitKey(1) & 0xFF
if key == ord('q'):
print('Exited gracefully')
cv2.destroyAllWindows()
breakWe will use Edge Impulse Studio to build and train our demo model. This requires us to create an account and initiate a new project at https://studio.edgeimpulse.com.
To upload the demo input images extracted from the pexels.com video into the demo Edge Impulse project, we will use the Edge Impulse CLI Uploader. Follow the instructions at the link: https://docs.edgeimpulse.com/docs/cli-installation to install the Edge Impulse CLI on your host computer.
Execute the command below to upload the dataset.
$ edge-impulse-uploader --category split images/*.jpg
The command above will upload the demo input images to Edge Impulse Studio and split them into "Training" and "Testing" datasets. Once the upload completes, the demo input datasets are visible on the Data Acquisition page within Edge Impulse Studio.
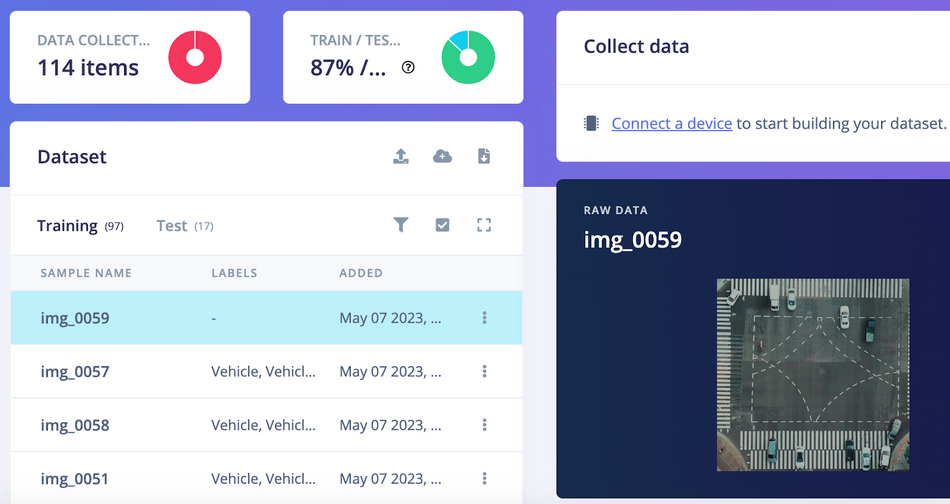
Now we can label the data with bounding boxes in the Labeling queue tab as shown in the GIF below.

Model training
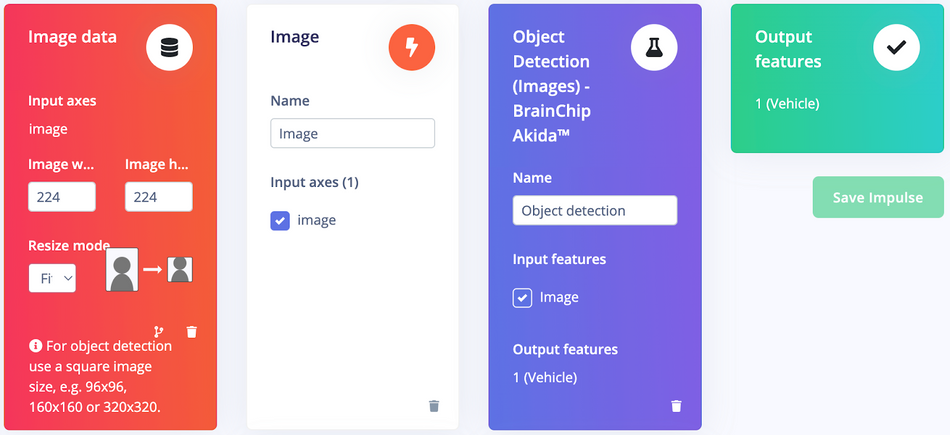
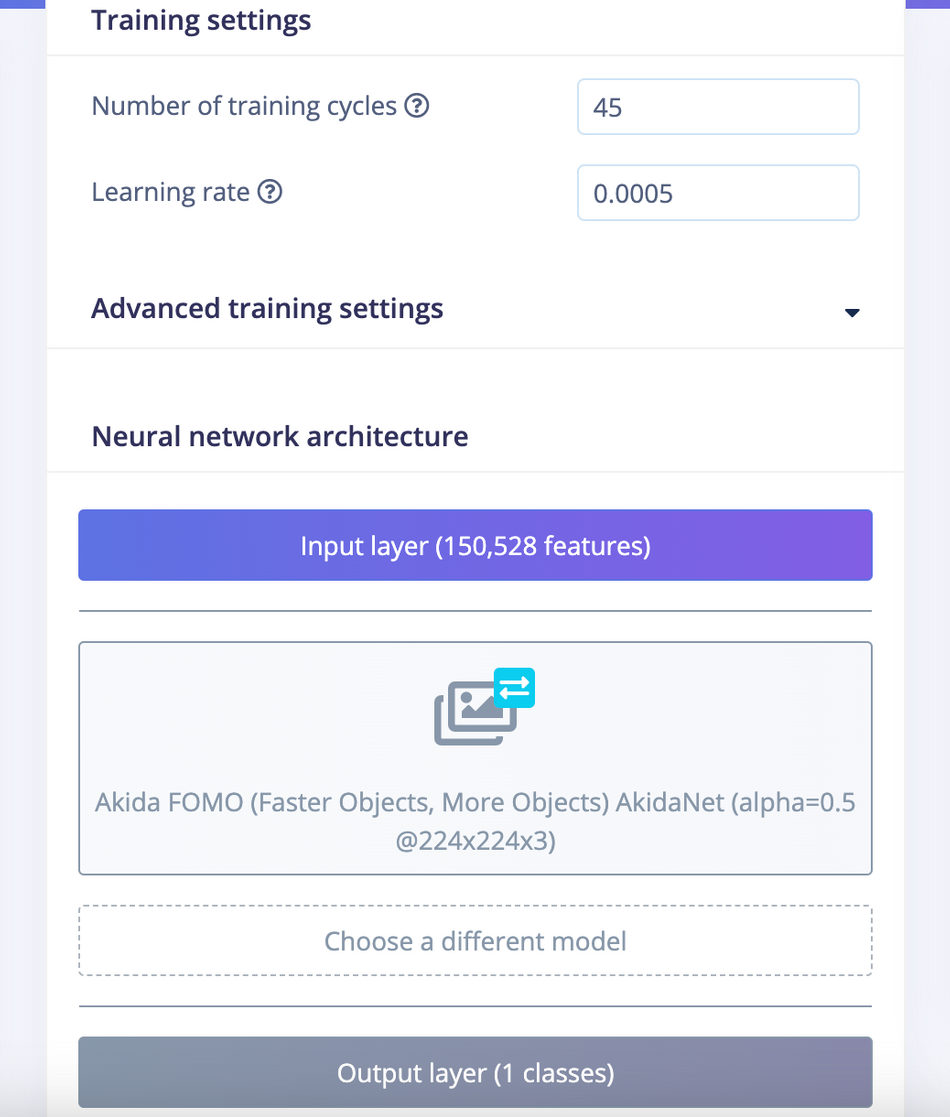
Go to the Impulse Design > Create Impulse page, click Add a processing block, and then choose Image. This preprocesses and normalizes image data, and optionally allows you to choose the color depth. Also, on the same page, click Add a learning block, and choose Object Detection (Images) - BrainChip Akida™ which fine-tunes a pre-trained object detection model specialized for the BrainChip AKD1000 PCIe board. This specialized model permits the use of a 224x224 image size, which is the size we are currently utilizing. Now click on the Save Impulse button.
On the Image page, choose RGB as color depth and click on the Save parameters button. The page will be redirected to the Generate Features page.
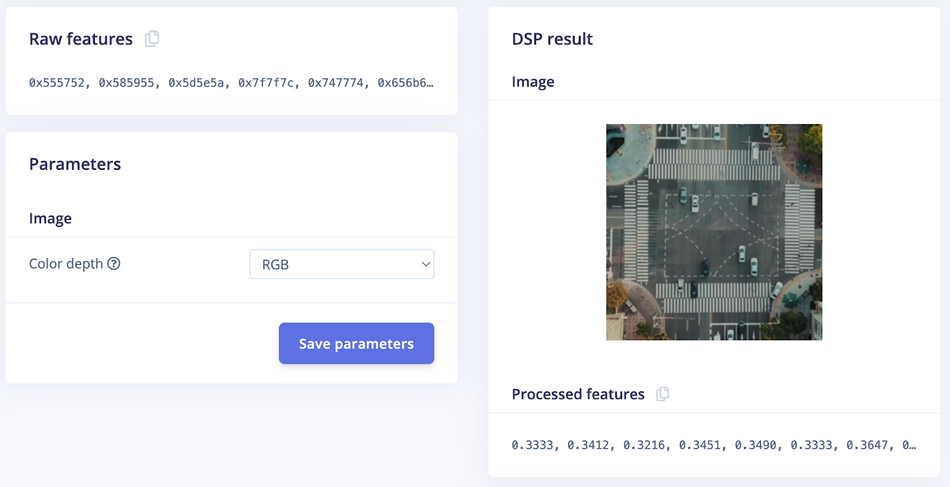
Now we can start feature generation by clicking on the Generate features button:
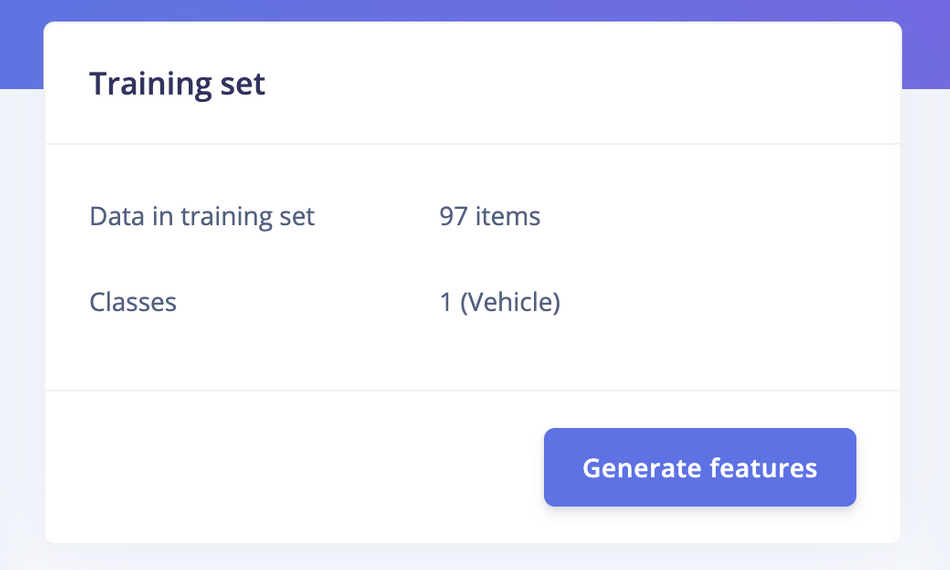
After feature generation, go to the Object Detection page and click on Choose a different model and select Akida FOMO. Then click on the Start training button. It will take a few minutes to complete the training.
The FOMO model uses an architecture similar to a standard image classification model which splits the input image into a grid and runs the equivalent of image classification across all cells in the grid independently in parallel. By default the grid size is 8x8 pixels, which means for a 224x224 image, the output will be 28x28 as shown in the image below.
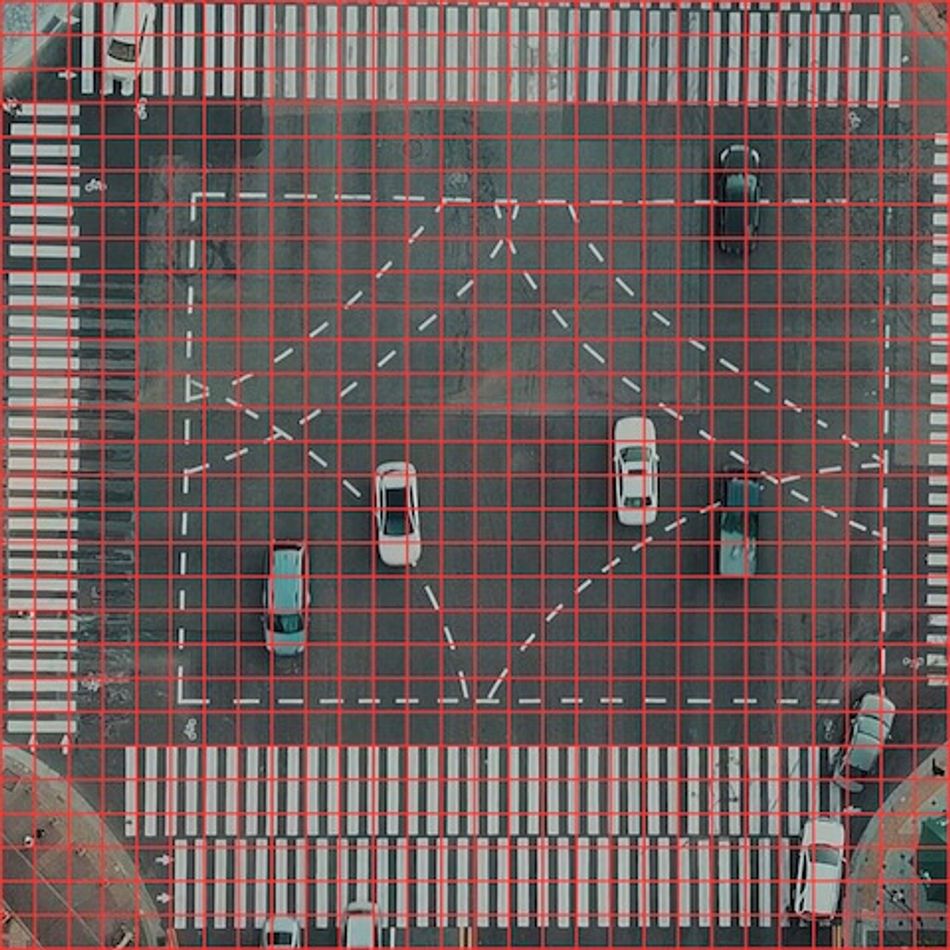
For localization, it cuts off the last layers of the classification model and replaces this layer with a per-region class probability map, and subsequently applies a custom loss function that forces the network to fully preserve the locality in the final layer. This essentially gives us a heat map of vehicle locations. FOMO works on the constraining assumption that all of the bounding boxes are square, have a fixed size, and the objects are spread over the output grid. In the aerial view images, vehicles look similar in size hence FOMO works quite well.
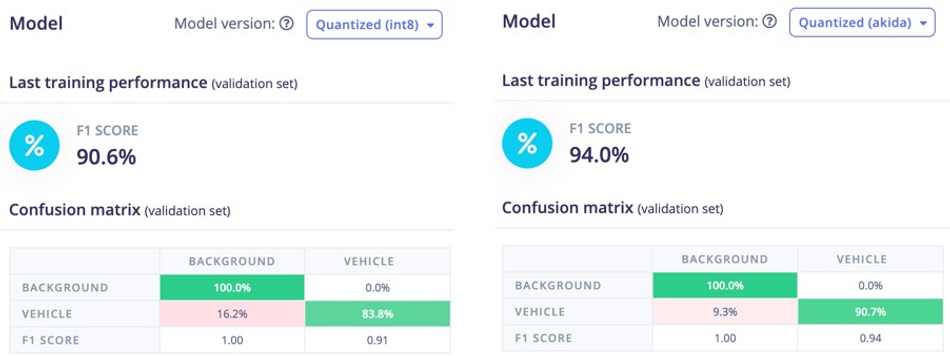
Confusion Matrix
Once the training is completed we can see the confusion matrices as shown below. By using the post-training quantization, the Convolutional Neural Networks (CNN) are converted to a low-latency and low-power Spiking Neural Network (SNN) for use with the Akida runtime. We can see in the below image, the F1 score of 94% of the Quantized (Akida) model is better than that of the Quantized (int8) model.
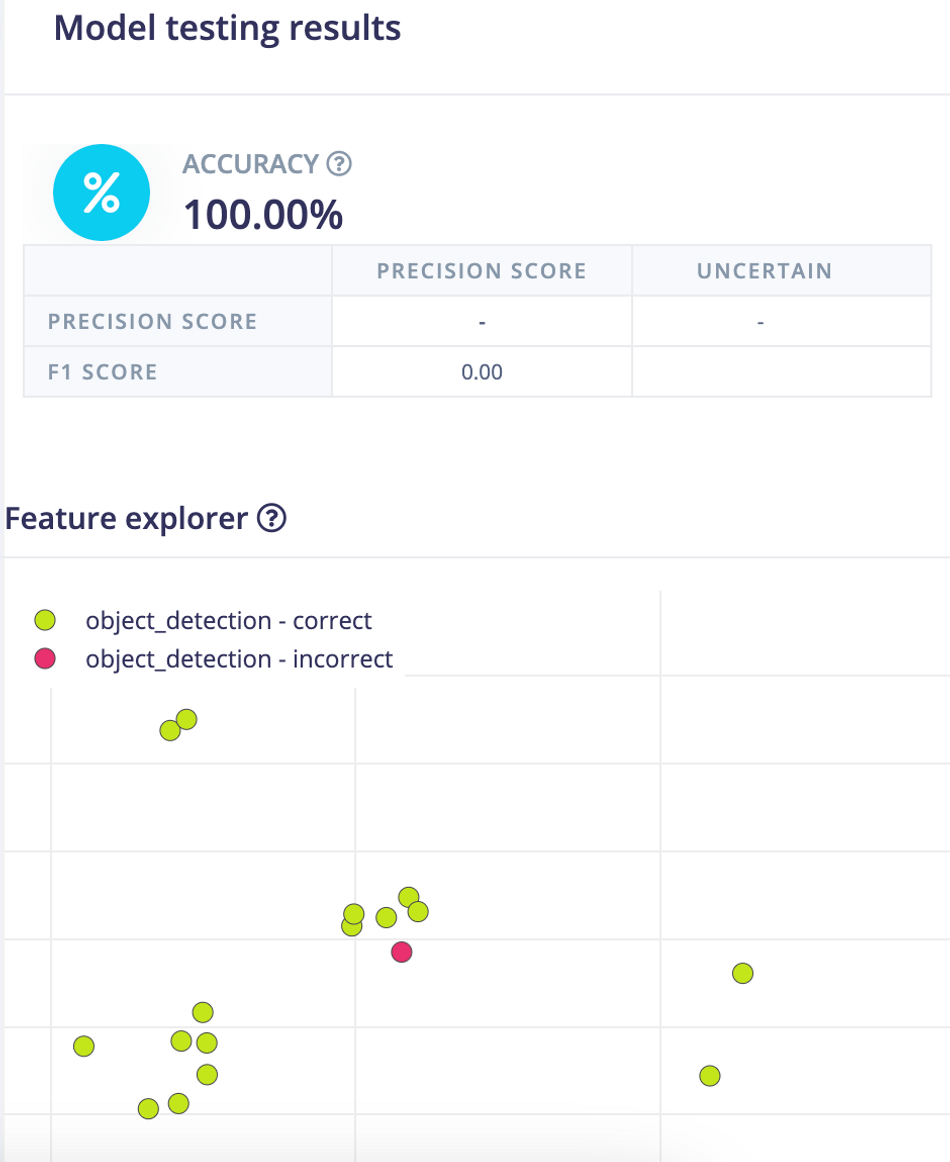
Model Testing
On the Model testing page, click on the Classify All button which will initiate model testing with the trained model. The testing accuracy is 100%.
Deployment
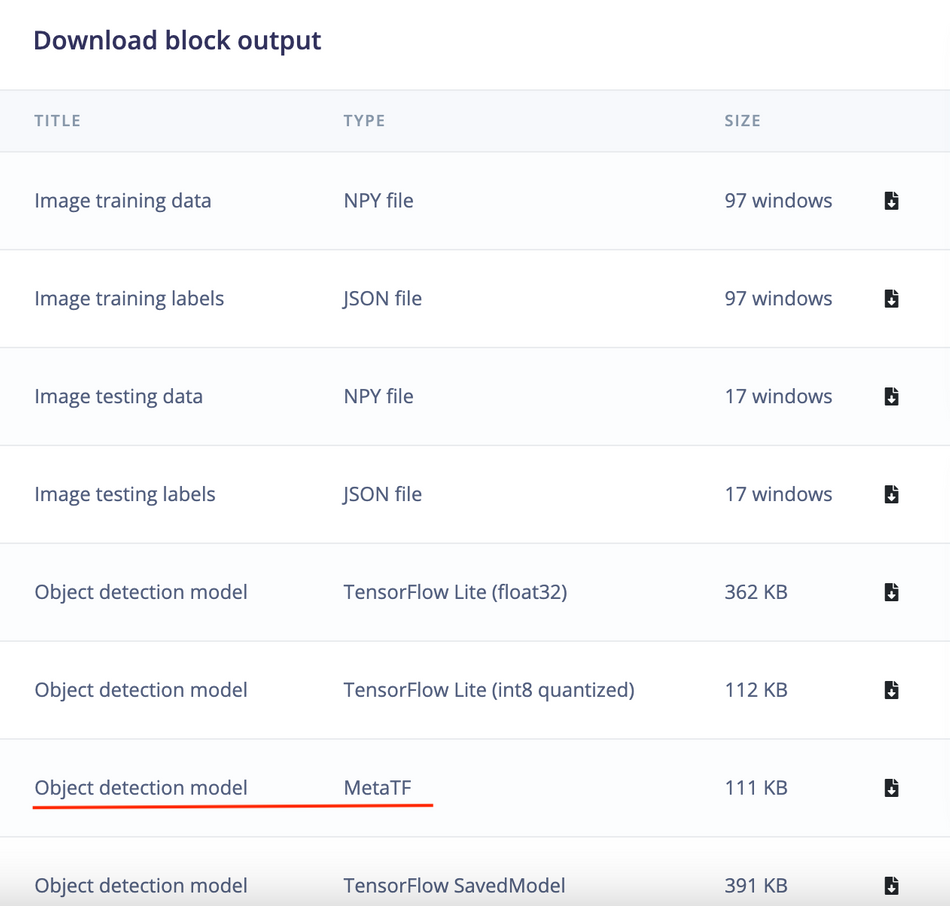
We will be using Akida Python SDK to run inferencing, thus we will need to download the Meta TF model (underlined in red color in the image below) from the Edge Impulse Studio's Dashboard. After downloading, copy the ei-object-detection-metatf-model.fbz model file to the Akida development kit using command below.
$ scp ei-object-detection-metatf-model.fbz ubuntu@<ip-address>:/home/ubuntu
Application Development
The application loads the MetaTF model (*fbz) and maps it to the Akida neural processor. The inferencing is done on the images from a video file. We have converted several Edge Impulse C++ SDK functions to Python to preprocess FOMO input. Below is the main code for inferencing.
import akida
import cv2
import math
import time
import signal
import threading
import numpy as np
from queue import Queue
from scipy.special import softmax
from flask import Flask, render_template, Response
app = Flask(__name__, static_folder='templates/assets')
EI_CLASSIFIER_INPUT_WIDTH = 224
EI_CLASSIFIER_INPUT_HEIGHT = 224
EI_CLASSIFIER_LABEL_COUNT = 1
EI_CLASSIFIER_OBJECT_DETECTION_THRESHOLD = 0.95
categories = ['Vehicle']
inference_speed = 0
power_consumption = 0
def ei_cube_check_overlap(c, x, y, width, height, confidence):
is_overlapping = not ((c['x'] + c['width'] < x) or (c['y'] + c['height'] < y) or (c['x'] > x + width) or (c['y'] > y + height))
if not is_overlapping:
return False
if x < c['x']:
c['x'] = x
c['width'] += c['x'] - x
if y < c['y']:
c['y'] = y;
c['height'] += c['y'] - y;
if (x + width) > (c['x'] + c['width']):
c['width'] += (x + width) - (c['x'] + c['width'])
if (y + height) > (c['y'] + c['height']):
c['height'] += (y + height) - (c['y'] + c['height'])
if confidence > c['confidence']:
c['confidence'] = confidence
return True
def ei_handle_cube(cubes, x, y, vf, label, detection_threshold):
if vf < detection_threshold:
return
has_overlapping = False
width = 1
height = 1
for c in cubes:
# not cube for same class? continue
if c['label'] != label:
continue
if ei_cube_check_overlap(c, x, y, width, height, vf):
has_overlapping = True
break
if not has_overlapping:
cube = {}
cube['x'] = x
cube['y'] = y
cube['width'] = 1
cube['height'] = 1
cube['confidence'] = vf
cube['label'] = label
cubes.append(cube)
def fill_result_struct_from_cubes(cubes, out_width_factor):
result = {}
bbs = [];
results = [];
added_boxes_count = 0;
for sc in cubes:
has_overlapping = False;
for c in bbs:
# not cube for same class? continue
if c['label'] != sc['label']:
continue
if ei_cube_check_overlap(c, sc['x'], sc['y'], sc['width'], sc['height'], sc['confidence']):
has_overlapping = True
break
if has_overlapping:
continue
bbs.append(sc)
results.append({
'label' : sc['label'],
'x' : int(sc['x'] * out_width_factor),
'y' : int(sc['y'] * out_width_factor),
'width' : int(sc['width'] * out_width_factor),
'height' : int(sc['height'] * out_width_factor),
'value' : sc['confidence']
})
added_boxes_count += 1
result['bounding_boxes'] = results
result['bounding_boxes_count'] = len(results)
return result
def fill_result_struct_f32_fomo(data, out_width, out_height):
cubes = []
out_width_factor = EI_CLASSIFIER_INPUT_WIDTH / out_width;
for y in range(out_width):
for x in range(out_height):
for ix in range(1, EI_CLASSIFIER_LABEL_COUNT + 1):
vf = data[y][x][ix];
ei_handle_cube(cubes, x, y, vf, categories[ix - 1], EI_CLASSIFIER_OBJECT_DETECTION_THRESHOLD);
result = fill_result_struct_from_cubes(cubes, out_width_factor)
return result
def capture(video_file, queueIn):
cap = cv2.VideoCapture(video_file)
fps = cap.get(cv2.CAP_PROP_FPS)
num_frames = cap.get(cv2.CAP_PROP_FRAME_COUNT)
resize_dim = (EI_CLASSIFIER_INPUT_WIDTH, EI_CLASSIFIER_INPUT_HEIGHT)
if not cap.isOpened():
print("File not opened")
sys.exit(1)
while True:
ret, frame = cap.read()
if ret:
#cropped_img = frame[0:720, 280:280+720]
#resized_img = cv2.resize(frame, resize_dim, interpolation = cv2.INTER_AREA)
resized_img = cv2.resize(frame, resize_dim)
img = cv2.cvtColor(resized_img, cv2.COLOR_BGR2RGB)
input_data = np.expand_dims(img, axis=0)
if not queueIn.full():
queueIn.put((frame, input_data))
else:
return
def inferencing(model_file, queueIn, queueOut):
akida_model = akida.Model(model_file)
devices = akida.devices()
print(f'Available devices: {[dev.desc for dev in devices]}')
device = devices[0]
device.soc.power_measurement_enabled = True
akida_model.map(device)
akida_model.summary()
i_h, i_w, i_c = akida_model.input_shape
o_h, o_w, o_c = akida_model.output_shape
scale_x = int(i_w/o_w)
scale_y = int(i_h/o_h)
scale_out_x = 1280/EI_CLASSIFIER_INPUT_WIDTH
scale_out_y = 1280/EI_CLASSIFIER_INPUT_HEIGHT
global inference_speed
global power_consumption
while True:
if queueIn.empty():
#print("queue empty, wait a while")
time.sleep(0.01)
continue
img, input_data = queueIn.get()
start_time = time.perf_counter()
logits = akida_model.predict(input_data)
end_time = time.perf_counter()
inference_speed = (end_time - start_time) * 1000
pred = softmax(logits, axis=-1).squeeze()
floor_power = device.soc.power_meter.floor
power_events = device.soc.power_meter.events()
active_power = 0
for event in power_events:
active_power += event.power
power_consumption = f'{(active_power/len(power_events)) - floor_power : 0.2f}'
#print(akida_model.statistics)
result = fill_result_struct_f32_fomo(pred, int(EI_CLASSIFIER_INPUT_WIDTH/8), int(EI_CLASSIFIER_INPUT_HEIGHT/8))
for bb in result['bounding_boxes']:
img = cv2.circle(img, (int((bb['x'] + int(bb['width']/2)) * scale_out_x), int((bb['y'] + int(bb['height']/2)) * scale_out_y)), 14, (57, 255, 20), 3)
img = cv2.circle(img, (int((bb['x'] + int(bb['width']/2)) * scale_out_x), int((bb['y'] + int(bb['height']/2)) * scale_out_y)), 8, (255, 165, 0), 3)
img = cv2.cvtColor(img, cv2.COLOR_RGB2BGR)
if not queueOut.full():
queueOut.put(img)
def gen_frames():
while True:
if queueOut.empty():
time.sleep(0.01)
continue
img = queueOut.get()
ret, buffer = cv2.imencode('.jpg', img)
yield (b'--frame\r\n'
b'Content-Type: image/jpeg\r\n\r\n' + buffer.tobytes() + b'\r\n')
def get_inference_speed():
while True:
yield f"data:{inference_speed:.2f}\n\n"
time.sleep(0.1)
def get_power_consumption():
while True:
yield "data:" + str(power_consumption) + "\n\n"
time.sleep(0.1)
@app.route('/video_feed')
def video_feed():
#Video streaming route. Put this in the src attribute of an img tag
return Response(gen_frames(), mimetype='multipart/x-mixed-replace; boundary=frame')
@app.route('/model_inference_speed')
def model_inference_speed():
return Response(get_inference_speed(), mimetype= 'text/event-stream')
@app.route('/model_power_consumption')
def model_power_consumption():
return Response(get_power_consumption(), mimetype= 'text/event-stream')
@app.route('/')
def index():
return render_template('index.html')
if __name__ == '__main__':
video_file = './video/aerial_1280_1280.avi'
model_file = './model/ei-object-detection-metatf-model.fbz '
queueIn = Queue(maxsize = 24)
queueOut = Queue(maxsize = 24)
t1 = threading.Thread(target=capture, args=(video_file, queueIn))
t1.start()
t2 = threading.Thread(target=inferencing, args=(model_file, queueIn, queueOut))
t2.start()
app.run(host = '0.0.0.0', port = 8080)
t1.join()
t2.join()Run Inferencing
To run the application, login to the Akida development kit and execute the commands below.
$ git clone https://github.com/metanav/vehicle_detection_brainchip_edge_impulse.git $ cd vehicle_detection_brainchip_edge_impulse $ python3 main.py
The inferencing results can be accessed at http://:8080 using a web browser. The application also displays the model summary mapped on the Akida PCIe neural processor on the console.
Available devices: ['PCIe/NSoC_v2/0'] Model Summary _____________________________________________________ Input shape Output shape Sequences Layers NPs ===================================================== [224, 224, 3] [28, 28, 2] 1 8 21 _____________________________________________________ ________________________________________________________________ Layer (type) Output shape Kernel shape NPs ====== HW/conv_0-conv2d_1 (Hardware) - size: 261248 bytes ====== conv_0 (InputConv.) [112, 112, 16] (3, 3, 3, 16) N/A ________________________________________________________________ conv_1 (Conv.) [112, 112, 32] (3, 3, 16, 32) 4 ________________________________________________________________ conv_2 (Conv.) [56, 56, 64] (3, 3, 32, 64) 6 ________________________________________________________________ conv_3 (Conv.) [56, 56, 64] (3, 3, 64, 64) 3 ________________________________________________________________ separable_4 (Sep.Conv.) [28, 28, 128] (3, 3, 64, 1) 3 ________________________________________________________________ (1, 1, 64, 128) ________________________________________________________________ separable_5 (Sep.Conv.) [28, 28, 128] (3, 3, 128, 1) 2 ________________________________________________________________ (1, 1, 128, 128) ________________________________________________________________ conv2d (Conv.) [28, 28, 32] (1, 1, 128, 32) 2 ________________________________________________________________ conv2d_1 (Conv.) [28, 28, 2] (1, 1, 32, 2) 1 ________________________________________________________________
Notice there is no Softmax layer at the end of the model. That layer has been removed during model conversion to run on the Akida processor. The Softmax operation is performed in the application code, rather than in the model..
Demo
The video used for the demonstration runs at a framerate of 24 fps, and the inferencing takes approximately 40ms per frame, resulting in real-time inferencing.
Conclusion
This project highlights the impressive abilities of the Akida PCIe board. Boasting low power consumption, it could be used as a highly effective device for real-time object detection in various industries for numerous use cases.
This article is based on: Traffic Monitoring using the Brainchip Akida Neuromorphic Processor - Expert Projects, a blog by Edge Impulse. It has been edited by the Wevolver team and Electrical Engineer Ravi Y Rao. It's the third article from the Spotlight on Innovations in Edge Computing and Machine Learning Series.
The first article introduced the series and explored the implementation of Predictive Maintenance system using a Nordic Thingy:91.
The second article described the implementation of voice control for making appliances smarter using a Nordic Thingy:53.
The third article dives deep into the application of EdgeAI for surface crack detection, showcasing its transformative role in modern industrial predictive maintenance systems.
The fourth article explains the integration of neuromorphic computing for real-time traffic monitoring, offering a technical blueprint for revolutionizing urban management.
About the sponsor: Edge Impulse
Edge Impulse is the leading development platform for embedded machine learning, used by over 1,000 enterprises across 200,000 ML projects worldwide. We are on a mission to enable the ultimate development experience for machine learning on embedded devices for sensors, audio, and computer vision, at scale.
From getting started in under five minutes to MLOps in production, we enable highly optimized ML deployable to a wide range of hardware from MCUs to CPUs, to custom AI accelerators. With Edge Impulse, developers, engineers, and domain experts solve real problems using machine learning in embedded solutions, speeding up development time from years to weeks. We specialize in industrial and professional applications including predictive maintenance, anomaly detection, human health, wearables, and more.
