Fetch Mobile Manipulator: A Fully Integrated Mobile Manipulation Research Platform
A mobile manipulator with sufficient payload capacity; tailored for pick-n-place and organization tasks.
Technical Specifications
| Manufacturer | Fetch Robotics |
| Processor | Intel i5 |
| Hard Drive | 120GB SS |
| Operating System | Ubuntu, Linux, ROS |
| Applications | Joystick Teleop, Movelt!, ROS Navigation |
| DOF-Arm Payload | 6 |
| Weight | 113.3 |
| Sensor | 25m 2D laser and a view field of 220 degrees |
| Arm Length | 940.5 |
| Gripper’s max. grasp force | 245 |
| Camera | 3D base-mounted camera, Primesense Caramine 1.09 head-mounted camera |
Overview
What is a Mobile Manipulator?
It is a robotic system capable of moving and lifting heavy items. The 4-wheeled mobile robotic platform can navigate independently because of the built-in laser sensor and a set of high-definition cameras. It can adjust its height and rotate about its axis depending on the requirements.
Moreover, the robotic arm is attached to the mobile robotic platform. It can reach the objects and lift them off the shelf with the help of the grippers attached at the non-fixed end.
Mobile manipulator robotic systems can either be controlled remotely. Or they can work on their own if integrated with laser sensors. Similarly, the robotic arm can adjust according to the environment and autonomously perform various tasks, such as lifting, moving, grasping, and placing objects.
The combined functionalities make this robotic system an ideal choice in various sectors. The robotic arm can be integrated with various modulatory gear, such as grippers, and perform various tasks. These include object manipulation, research and inspection, pick-and-place operations, maintenance, and human-assistance tasks.
A mobile manipulator can be used in warehouses, logistics, healthcare, agriculture, surgery, quality control, research, and more.
Robotic Mobile Manipulation: Fetch
The Fetch Mobile Manipulator Robotic system is a fine example. Its long-range sensors, dual camera support, powerful DOF arm, and autonomous mobility make it an ideal warehouse management robot.
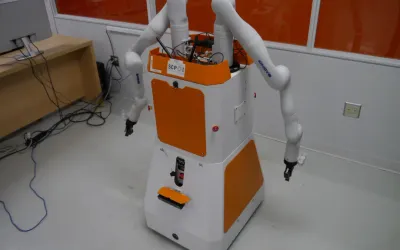
Fetch Mobile Manipulator Construction
This mobile manipulator weighs 113.3 kg and can lift objects to 6kg. The parallel-jaw gripper attached to the 940.5mm long robotic end can produce a force up to 245N, and they’re wide enough to grip a typical warehouse item.
The mobile robot features a mobile base attached to a stand-alone robot platform. The pan is there to keep the objects during mobility. The mobile robot platform also features a tile head for better visibility. It consists of a Primesense Carmine 1.09 3D camera, while another 3D camera is mounted on the mobile base.
The mobile base also features a 2D laser sensor with a 25m range and 220 degrees wide view field.
Motors
There are two brushless hub motors at the 4-wheeled differential drive base. The drop suspension configuration of the motors enables the robot to cross obstacles while manipulating flat surfaces safely. They prevent the robot from swaying side-to-side.
Arm Joints
Fecth Robotics used a harmonic drive attached to a brushless motor for arm joints. The custom-cast aluminum housing provides complete protection to the joints. To ensure smooth signal transmission, each joint features two magnetic encoders. One of the 14-bit absolute magnetic encoders is attached to the motor back shaft, while the other is coupled to the output shaft of the joint.
Gripper
Users can choose custom grippers according to their needs. However, the standard model has a default parallel-jaw gripper with a 100mm width that can pick-n-place a wide range of objects.
The Software
The warehouse automation robotic system is powered by Intel i5, Haswell processor, and has a built-in Ubuntu Linux LTS, ROS. It features a 120 GB SSD drive and built-in applications like ROS Navigation, Joystick Teleop, and Movelt!
The Intel-based operating system offers high-speed processing, allowing manipulation, navigation, and decision-making.
Battery
Fetch Mobile Manipulator has a sufficient battery backup to perform its tasks throughout the 8-hour shift. However, it is essential to consider the battery choice and the amount of power the processing unit utilizes based on the operations.
Areas of Applications
Considering the design and functionalities, Fetch Mobile Manipulator can be pretty useful for warehouse operations and other fields. It can also be utilized in labs and homes. The robot has been designed for shelf picking. But it can also reach objects on the ground to pick them up, hence a handy organizing tool.
References
Recommended Specs



Continue Reading

One of the main things people are interested in when solving a complex robotic manipulator problem is the DoF and Functions. These two distinct pieces of terminology help to shortcut conversations and make sure everyone is talking on the same page!

3 minutes read

Rosie is a dual arm mobile manipulation robot designed for pick and place in an industry 4.0 setting.

8 minutes read


InDro Launches New Online Store
4 minutes read
