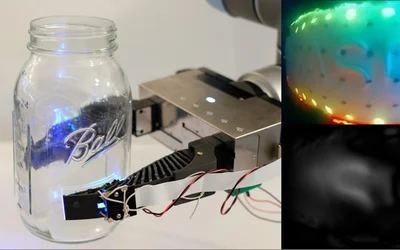
In a recent project, Professor Edward Adelson and Sandra Liu — a mechanical engineering PhD student at CSAIL — have developed a robotic gripper using novel “GelSight Fin Ray” fingers that, like the human hand, is supple enough to manipulate objects.
Be the first to know.
Get our grippers weekly email digest.
Tagged with
grippers
ORGANIZATIONS. SHAPING THE INDUSTRY.
Latest Posts


The end-of-arm tooling (EOAT) is one of the most important parts of your robot system. The EOAT spends the most time interacting directly with your parts and a well-designed tool/part interface can save both time and effort when programming a task that requires precision.

3 minutes read


In this episode, we talk about how starfish larvae inspired robots can revolutionize drug delivery and drones with flacon-like legs for landing.



This handbook introduces the concept of bin-picking, and explores its complexity through real-case studies.

2 minutes read

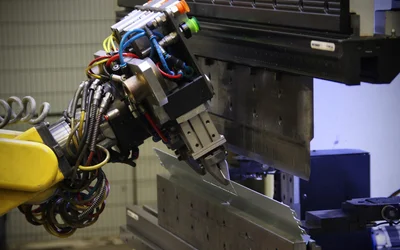
Preziosa Francesco SRL & Add-it redesigned the grippers of their in-house press brake bending robotic cell for metal 3D printing. The final design was ready for application in just 4 days, increased system reliability, bypassed a supply chain bottleneck, and enabled lights-out manufacturing.

6 minutes read

A team of researchers tested their gripper in multiple zero-gravity settings, including the International Space Station.

5 minutes read
It’s one thing for a robot to sort through a pile of rigid objects like blocks, but what about softer stuff?

2 minutes read


Origami-inspired muscles are both soft and strong, and can be made for less than $1

4 minutes read


Harnessing friction gives soft robots new capabilities
3 minutes read
