Design inspiration from woodpeckers could allow robotic arms to be bendable and extendable
The robot arm, which is inspired by a woodpecker's tongue, can be extended many times its length, bent into an S-shape, and stored in a small space, like Doctor Octopus from the Spider-Man series.

21 Feb, 2022. 4 minutes read
This article is a part of our University Technology Exposure Program. The program aims to recognize and reward innovation from engineering students and researchers across the globe.
About the project
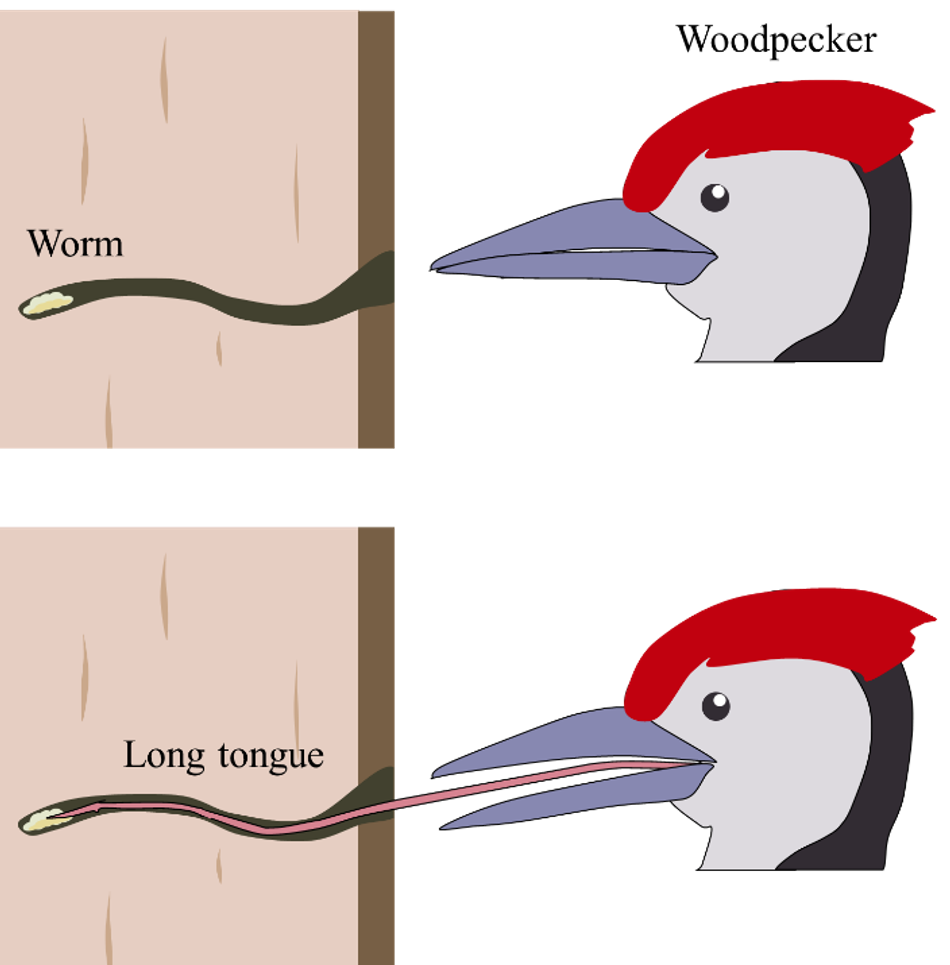
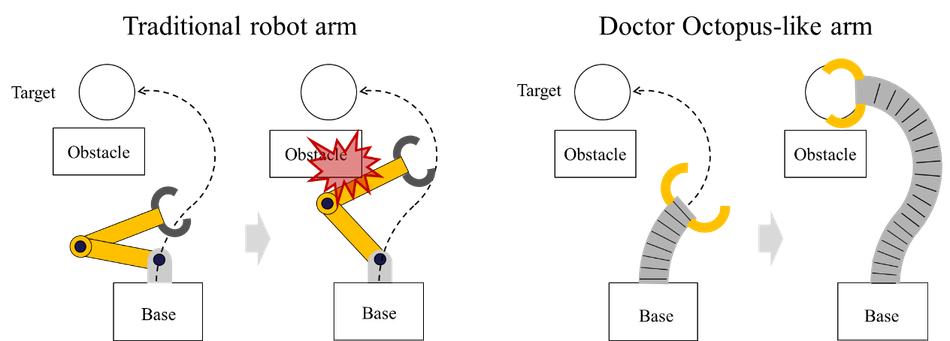
Woodpeckers have flexible and extendable tongues that they use to reach their prey through tiny openings in trees and insect burrows (Fig. 1). A robotic manipulator with these capabilities would be advantageous. For example, this kind of manipulator would be able to reach a product on the back of a cluttered shelf (Fig. 2). Such a concept is promising for applications that require picking and handling actions in unstructured environments, but to date only exists in science fiction and fantasy (e.g., Doctor Octopus in Marvel's Spider-Man).
Continuum robots are those with manipulators that are inspired by the lightweight and flexible structures of animals such as an octopus-arm and elephant trunk. Although some of them can bend and extend their body in any direction (e.g., FESTO-Bionic Handling Assistant), they lack stiffness and restrict their applications, particularly those which require the grabbing and carrying of heavy objects. They also limit the extension distance, only about twice the maximum body length.
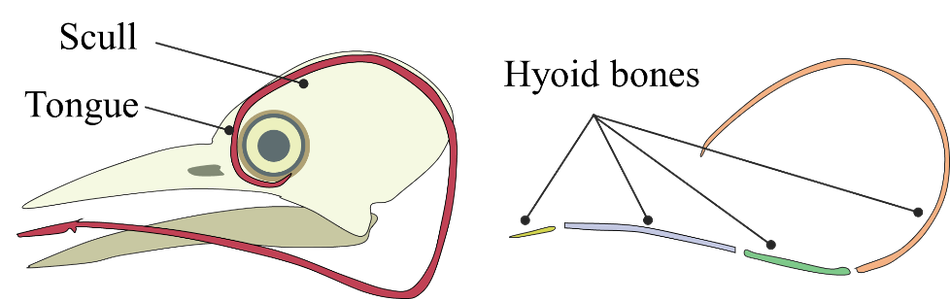
To address this problem, we focused on a woodpecker tongue. Woodpeckers have unique anatomical features that manipulate their surprisingly long tongues. Unlike the human and anteater tongues, which are made mainly of muscle, the woodpecker's tongue is rigidly supported by the bones (Fig. 3). To store the long tongue inside a small head, it passes under the base of the jaw and wraps around the back and top of the head.
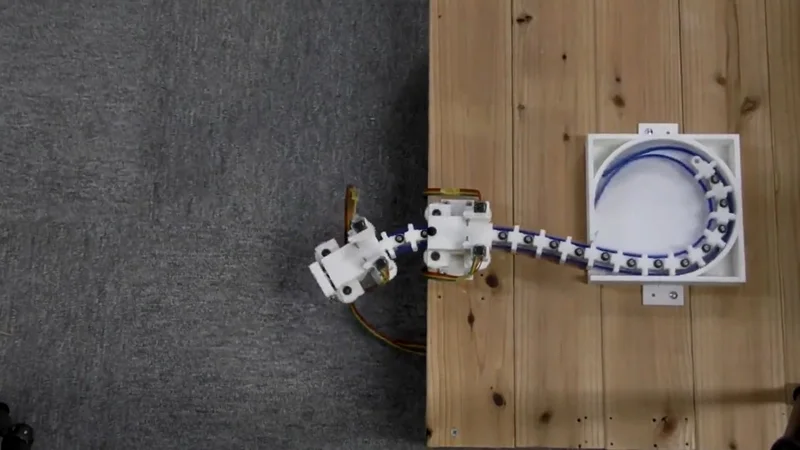
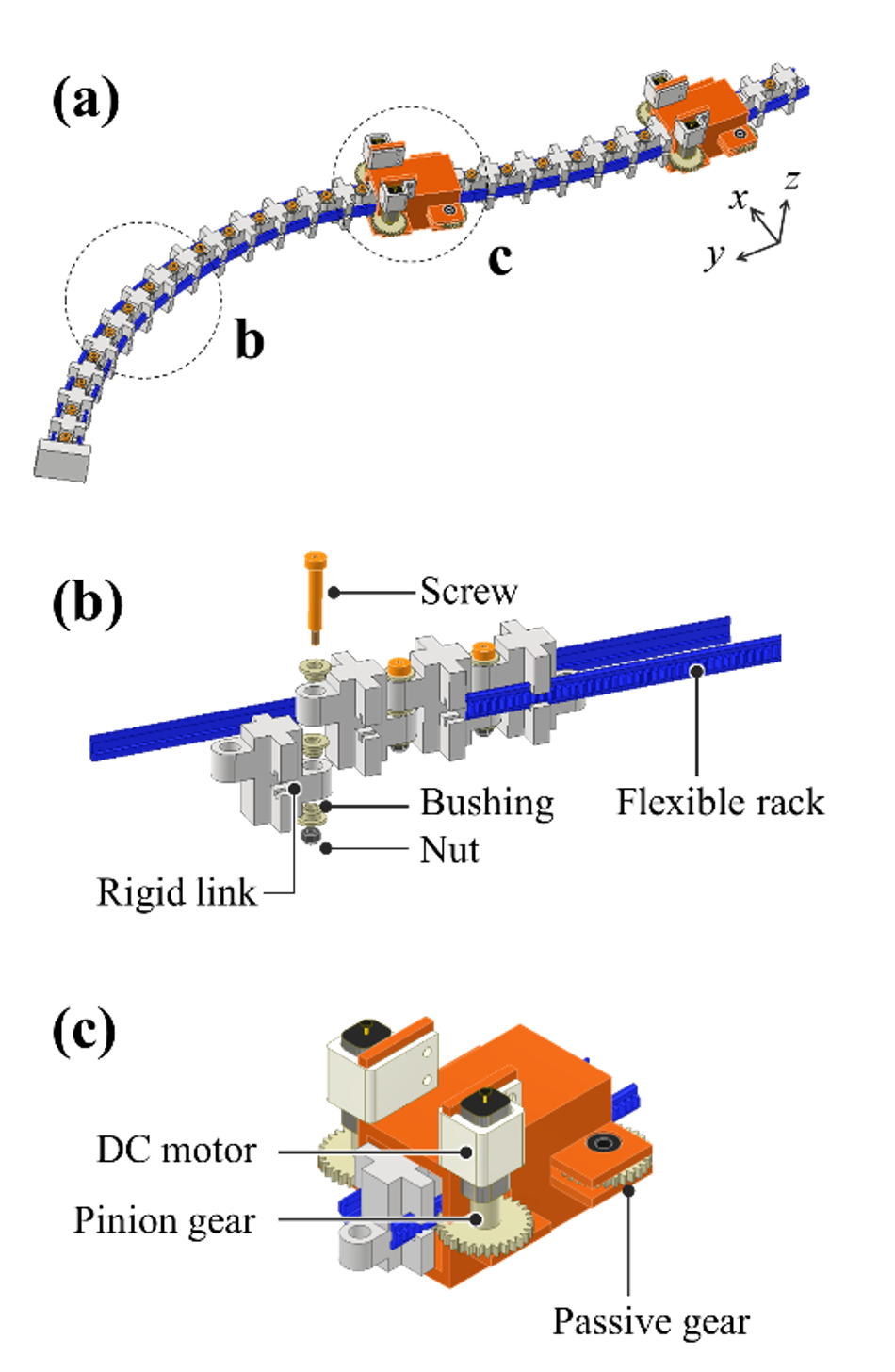
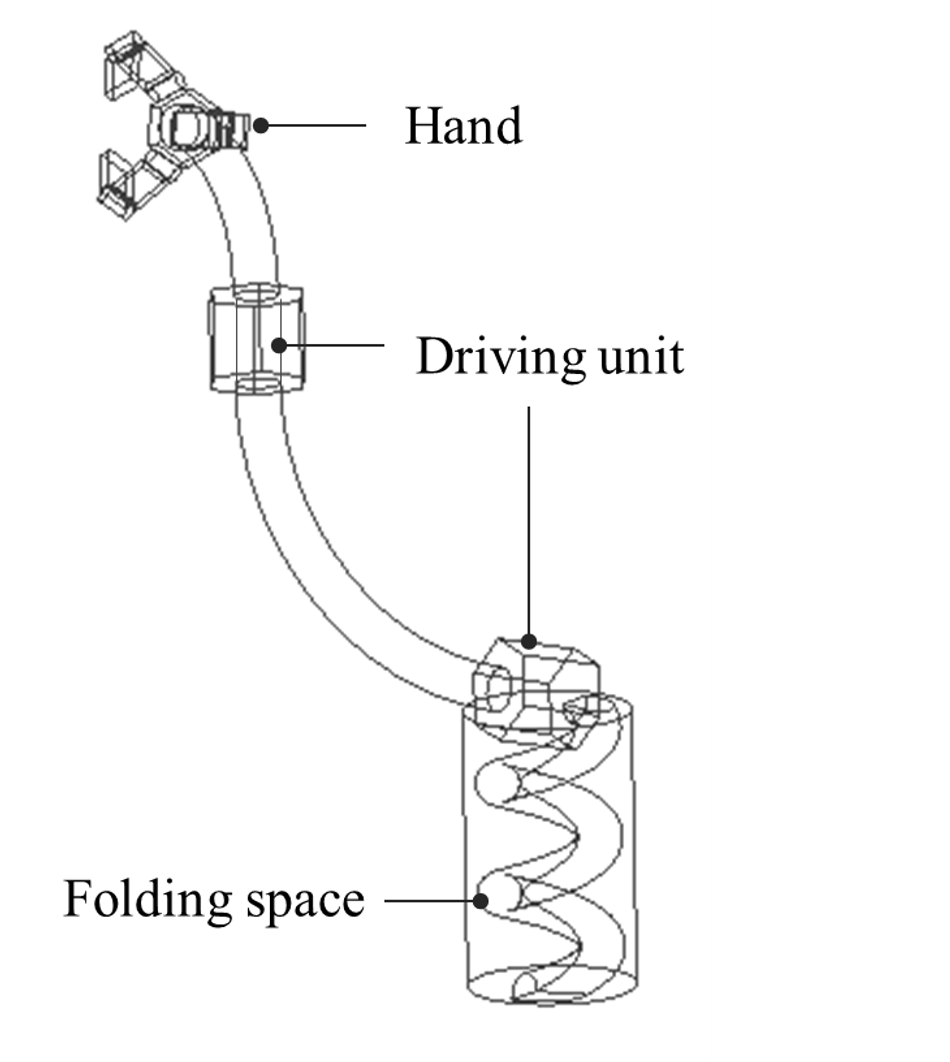
To reproduce these functions, we designed a robot manipulator that can substantially extend its length and bend its shape in 2D space (Fig. 4). This behavior is enabled by a backbone consisting of a chain of rigid joints and two flexible rack gears. The joints increase the payload by structurally supporting the robot. The proposed structure is 4.7 times stronger in vertical bending and 6.2 times stronger in torsion than without rigid links. Feeding the rack gears at the same and different speeds allows the robot to elongate and bend, respectively. Our robot has a long extension distance that depends on the length of the tongue. In addition, the manipulator body can be stored inside a small space (see the attached video).
Problems solved by the project
To illustrate the importance of this project, one should think of a conventional robot's arms or legs, for instance. Rigid manipulators designed to be stiff to achieve precise and repetitive position control are helpful in well-defined and structured environments, primarily manufacturing factories. However, they struggle to operate in unstructured environments such as homes and open fields. This is a fundamental problem in robotics because of its limited ability to accurately recognize the surrounding environment and contact/deal with objects in the right way, and overcoming it will be a milestone.
Our project leads to realizing systems that are safer, cheaper, and more adaptable than the level that traditional robots can achieve. In our mechanism, the extending actuation allows robots to select a safe path that serial manipulators cannot follow, as shown in Fig. 2. The inherent compliance of our manipulator is safe to an unexpected impact and provides environmental adaptability. We believe that this technology could be used for search and rescue, agricultural, space, maintenance, cleaning, and other applications.
The present state of the art
Soft robots (or continuum robots) have gained a significant amount of traction over a decade to overcome rigid robot problems, but their applications are limited. The main reason for this is that while material softness provides safety and adaptability, it also reduces the stiffness and payload. On the other hand, soft robots without rigid components cannot lift heavy loads regardless of their exertion force. Variable stiffness mechanisms to temporarily stiffen soft materials have attracted much attention in the past few years, but they are not suitable for manipulators because robots cannot operate during hardening.
Team working on the project
This research has mainly been conducted by Ryota Matsuda, a master-course student, Ujjal Mavinkurve, a master-course student, and Ayato Kanada, an assistant professor at Kyushu University. Our next step is to extend our manipulator into three dimensions to make it look like a real Doctor Octopus's tentacle.
Conclusion
The unique design and build of the novel robotic arm combine the benefits of both conventional rigid robotics and soft robots. Robotic hands that can operate in unstructured environments can unlock multiple opportunities for application in biomedical instrumentation, manufacturing, space research, agriculture, and numerous other fields of engineering.
About the University Technology Exposure Program 2022
Wevolver, in partnership with Mouser Electronics and Ansys is excited to announce the launch of the University Technology Exposure Program 2022. The program aims to recognize and reward innovation from engineering students and researchers across the globe. Learn more about the program here.

Reference
[1] R. Matsuda, U. Mavinkurve, A. Kanada, K. Honda, Y. Nakashima, M. Yamamoto, "A Woodpecker's Tongue-inspired, Bendable and Extendable Robot Manipulator with Structural Stiffness," IEEE Robotics and Automation Letters (RA-L), Vol. 7, No. 2, pp. 3334-3341.