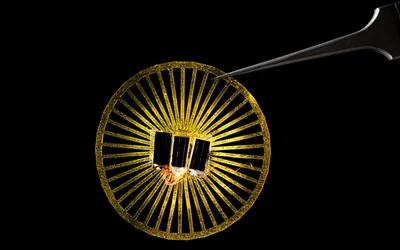
Multigait Soft Robot
A soft robot, composed exclusively of soft materials, which is inspired by animals that do not have hard internal skeletons. This robot is quadrupedal meaning it uses no sensors, only five actuators, and a simple pneumatic valving system that operates at low pressures. A combination of crawling and undulation gaits allow this robot to navigate through difficult obstacles. The advantage of this soft roboticsis that a simple type of actuation produces a complex motion.
Overview
This robot is quadrupedal meaning it uses no sensors, only five actuators, and a simple pneumatic valving system that operates at low pressures. A combination of crawling and undulation gaits allow this robot to navigate through difficult obstacles. The advantage of this soft robotics that a simple type of actuation produces a complex motion.
Design
Specifications and applications
Masters for the pneu-nets (PNs) were fabricated in acrylonitrile butadiene styrene (ABS) using a threedimensional (3D) printer (Dimension 3D; Stratasys, Inc.) We molded PNs into a highly extensible, elastomeric material (Ecoflex 00-30; Smooth-On, Inc.) and then layered them onto a relatively inextensible, compliant sheet [poly(dimethyl siloxane) (PDMS); Sylgard 184, Dow Corning].
We then inserted five soft, flexible tubes (1 mm i.d., silicone rubber) into a hub located at the posterior section of the soft robot; this hub fed the five separate PNs (the tubing was held in place by compression from the surrounding, punctured Ecoflex silicone rubber). We also fabricated a robot capable of faster crawling locomotion using an extensible elastomer (Ecoflex 00-50; Smooth-On, Inc.) with a larger Young’s Modulus than Ecoflex 00-30.
The physical dimensions of the robot, as well as the dimensions of the PNs are shown in Fig. S1. Both the Ecoflex elastomers, as well as the Sylgard 184 were cured at 75 °C for 60 min prior to use. We glued the cured Ecoflex layer to the cured Sylgard 184 layer by using a thin, uncured layer of Sylgard 184 as glue; we then allowed the uncured PDMS to permeate into the Ecoflex and Sylgard 184 layers for 60 min and finished the bonding of the glue layer by baking the robot in an oven at 75 °C for 60 min. To increase production throughput, we typically fabricated four robots in parallel.
Real world applications
Many of the capabilities of soft robots will ultimately be de- fined, we believe, by the materials used in their fabrication, and the use of soft materials may simplify the more complex mechanical structures used in hard robots. A simple elastomeric structure of appropriate design, for example, can provide the function of a hinge or joint, without the complexity of a multicomponent mechanical structure).
Soft robotics may, thus, initially be a field more closely related to materials science and to chemistry than to mechanical engineering. Soft organisms, ones without endo or exoskeletons, are ubiquitous. Many of the most interesting and versatile of these organisms (e.g., squid) live in water. The buoyancy of water obviates the need for a mechanically strong and rigid skeleton: The structural features developed by land animals to retain form and to move in a gravitational field are unnecessary.
The mechanical characteristics of the tissues of soft-bodied marine organisms that limit them to a neutrally buoyant medium are easily circumvented by using synthetic elastomers that are structurally tougher than these tissues. Soft robots based on appropriate elastomers can move, without difficulty, in a gravitational field, without fluid support.
Specifications
- Uses no sensors
- Five ac- tuators
- Pneumatic valving system that operates at <10 psi
References
Recommended Specs



Continue Reading
In this episode, we talk about how engineers inspired by some of biology’s most miniature wonders (like dandelions' seeds and microorganisms' cilia) are using their knowledge to make major breakthroughs in biosensing, robotics, biomedical engineering, and more.


From hospital wards to crop fields, from microscopic swarms to biohybrid machines powered by fungi, robotics research at Cornell spans an astonishing range of scale, application and ambition.

2 minutes read


An ITMO PhD student has devised a way to design flexible robots capable of withstanding a shock load, retaining its energy, and adapting to movement on rough surfaces. The new robot’s joints are connected by flexible hinges rather than turning kinematic pairs.

3 minutes read
