Arduino Controlled Robofish for Underwater Exploration
A Robotic fish powered by Arduino-based underwater propeller control.
Technical Specifications
| Purpose | Underwater locomotion |
| Operation | Remote-controlled |
| Microcontroller | Arduino Pro Mini |
| Battery | 1000mAh Two-cell LiPo battery |
Overview
Arduino Pro Mini - A Suitable Choice for Underwater Operation
Arduino Pro Mini is a miniature microcontroller board that proved to be a fitting choice for a microcontroller for the RoboFish. It features 14 I/O pins with an additional 6-pin header connecting an FTDI cable. This lets the user connect USB power and external communication modules with the Arduino board.
Because of its small size, the Arduino Pro Mini fits perfectly inside the waterproof box. It contributes to the lighter weight of the RoboFish. The board features up to six PWM pins for speed and direction control of the propeller mechanism.
Thanks to a simplistic and user-friendly development eco-system for Arduino, the project can be conveniently replicated, allowing Arduino developers to understand the mechanics of underwater locomotion.
Realistic Fish-Like Movement with Pectoral Fins and Tail Functionality
The RoboFish is lightweight and swims smoothly underwater, thanks to the material choice. It features a spiral dorsal section made from PVC plastic. The RoboFish closely mimics the movements of a real fish.
The Pro Mini Arduino motor driver powers the swimming mechanism that operates the ballast tanks to support locomotion. Moreover, the pectoral fins are supposedly added to help the fish steer underwater. However, the current design doesn’t feature the steering functionality. Therefore, the fish moves in straight lines in the forward direction.
The entire system runs on a two-cell 1000mAh battery. It consists of an infrared receiver that triggers the motion after receiving a signal from a standard TV remote control. Since IR communication relies on line-of-sight transmission, the user has more control over the movement in more transparent water.
Ballast Tanks and UBEX Power Protection
To support adequate propulsion and buoyancy, the RoboFish features a ballast tank. It stabilizes the body structure by maintaining the longitudinal balance, also known as the ‘Trim’ of the fish. Moreover, it also regulates depth control, allowing the fish to float higher or deeper underwater.
The user can control the buoyancy and forward movement with a TV remote, making it operate conveniently. Additionally, the RoboFish features UBEX for power protection, a critical factor for underwater applications.
RoboFish Paves the Way for Low-Cost Underwater Locomotion Applications
The RoboFish works as an inspiration for developing low-cost underwater movement applications. Using a simplistic IR communication principle and the concepts of ‘Trim’ and ‘Draft,’ the RoboFish explains the working mechanism that could power advanced underwater robots in the future.
As a result, it can inspire engineers to develop low-cost vehicles for various applications like underwater surveillance, marine life research, underwater topographical mapping, and many others.
References
Recommended Specs



Continue Reading
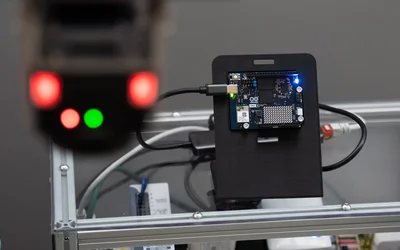
How IDT Solution built an open-architecture AOI system for automotive end-of-line quality control – without proprietary PLCs or software licenses.

3 minutes read

The new Arduino UNO R4 Wi-Fi board provides built-in Wi-Fi and Bluetooth communication as well as a 12×8 LED matrix display to give makers, hobbyists, and engineers an extremely versatile prototyping tool.


New ways to monitor glucose without finger pricks could help the millions of people around the world who need to manage diabetes in their lives every day. Viit Health partnered with Softeq to prototype a promising new solution.
