Swissloop Tunneling: Revolutionizing the Tunneling Industry
This article outlines what Swissloop Tunneling is, how Groundhog Alpha is structured, what potential applications it has, which milestones have been achieved, and what is planned for the future.

10 Mar, 2022. 4 minutes read

This article is a part of our University Technology Exposure Program. The program aims to recognize and reward innovation from engineering students and researchers across the globe.
Community voting is now live. Vote for your favorite submission by visiting: University Technology Exposure Program February Community Vote.
Swissloop Tunneling
Swissloop Tunneling is a student-led association based at the Swiss Federal Institute of Technology (ETH) Zurich researching tunneling solutions. Last year, the Swissloop Tunneling team designed and built their first tunnel boring machine, “Groundhog Alpha”, named after one of nature’s most creative tunnel building animals. With its unique steering mechanism and progressive tunnel lining system, Groundhog Alpha is more agile than conventional microtunneling solutions and can 3D-print the tunnel tube while continuously moving forward.
Hyperloop Concept
Hyperloop is a new form of transportation that seeks to overcome todays’ issues of conventional mobility systems. Hyperloop is a futuristic form of transport, consisting of a sleek pod-like capsule levitating inside vacuum tubes, accelerating across the country at high speeds, being inexpensive for goods and people. The technology is also more sustainable and with targeted speeds of over 1000 km/h (600 mph) faster than high-speed trains and aeroplanes. Swissloop Tunneling contributes with its research to optimise the tunnel system for the Hyperloop concept.
Current Challenges in the Tunneling Industry
One of the most significant issues in tunneling nowadays is the high cost and the challenging logistic management. The boring machines and the tube sections are heavy and usually need to be transported over hundreds of kilometres to the digging site. Most conventional tunnel boring machines are standing still when tube sections are placed in position. Under these premises, the Hyperloop concept is tough to realise in areas where tunneling is required. Current large tunnel boring machines (which would be required for road construction) are not standardised and too expensive for the hundreds of kilometres of tunnels needed for large-scale Hyperloop networks. Furthermore, pipe jacking, the standard solution used for shorter tunnels with smaller diameters, is not scalable to the Hyperloop diameters of approximately 4 meters. Therefore, Swissloop Tunneling is developing small-scale tunneling machines with innovative processes with the aim of scaling them up in the future.
Technical description of Groundhog Alpha
For the last year, Swissloop Tunneling designed, constructed, and tested their tunneling machine Groundhog Alpha. The organisation intentionally followed a very innovative and demanding approach. Swissloop Tunneling is confident that this new approach will be the base for new tunneling solutions in the future.
Subsystems
Soil Erosion
The soil erosion system cuts out large stones using the custom-designed cutting wheel. Subsequently, it crushes those stones into smaller chips (1-2 cm) using the cone crusher. The tungsten-carbide coating ensures longevity and enables the crusher to get a better grip. In the last step, all the slurry is washed out of the erosion chamber using 10bar water pressure and a Venturi vacuum pump which is placed at the rear of the machine. With a torque of 8.5 kNm, a rotation speed of 27 rpm and a pushing force of 200kN Swissloop Tunneling is prepared for any soft-soil conditions that could come in Groundhog Alpha’s way.
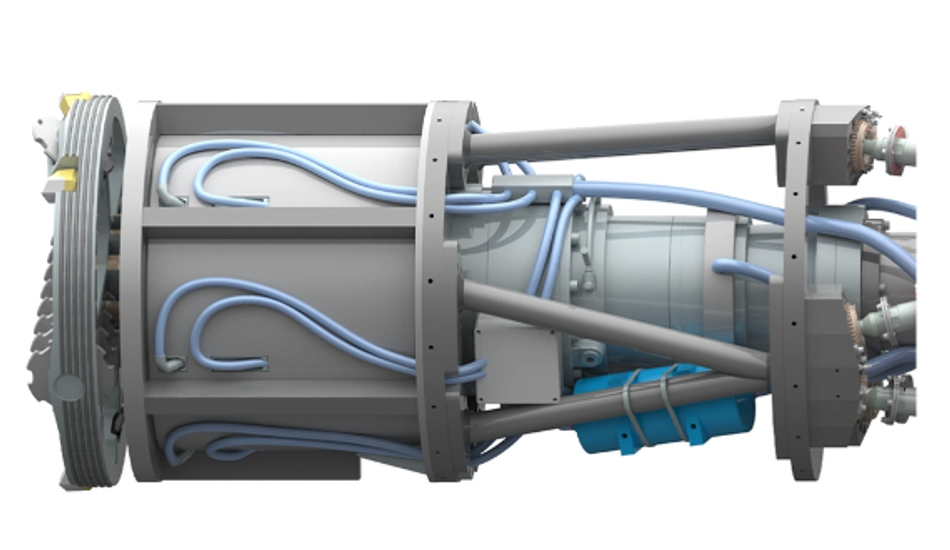
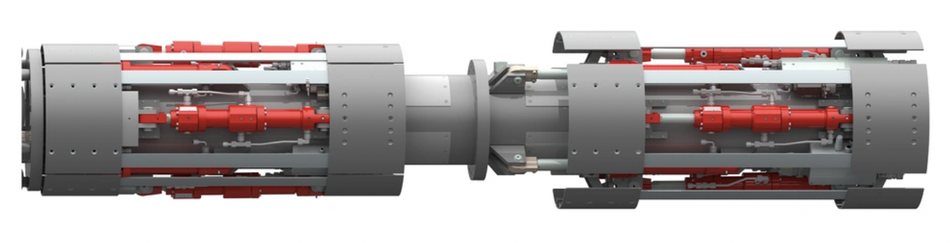
Steering
In order to dig curved tunnels, an innovative, custom-made hydraulic hexapod system is used. With six hydraulic high-precision cylinders, it’s possible to move the cutter head in six degrees of freedom. With our custom software, it can be put in jackhammer mode, allowing for strong vibrations of frequencies as high as 20 Hz.

Liner
To create a tunnel wall, a special polymer 3D printer is built into the machine. Using tough glass fibre lamellas and a two-component polymer mix, it is possible to create a 15 mm thick and highly reliable tunnel wall to ensure structural integrity along the whole length of the tunnel.
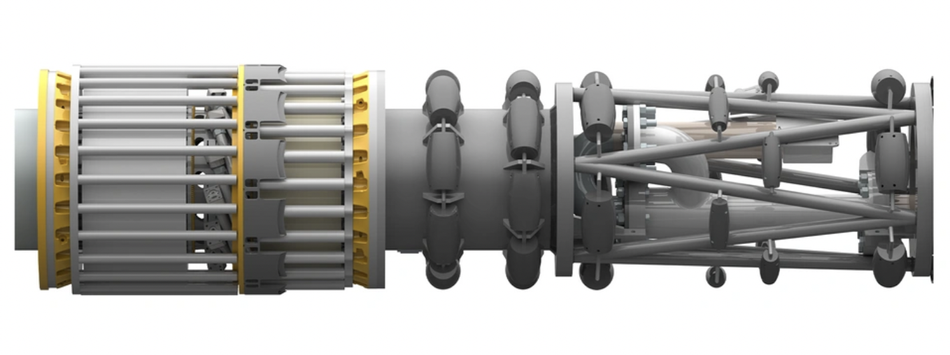
Propulsion
In the propulsion section, 16 coordinated, high-performance hydraulic cylinders press bracing plates against the tunnel wall in a continuous fashion allowing uninterrupted movement and a propulsion force of max. 200 kN.
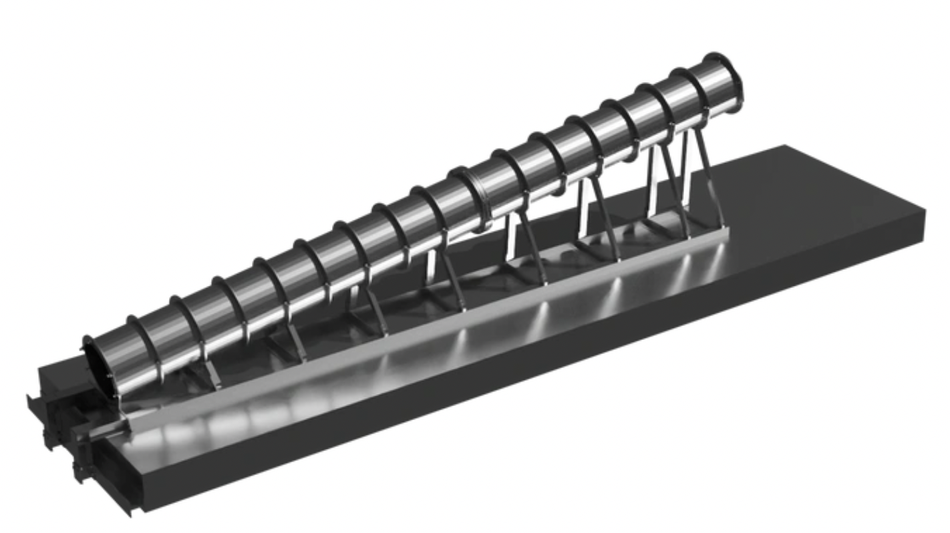
Starting Platform
Starting from the surface the team will not have to dig a starting pit, enabling Groundhog Alpha to start digging down straight away, saving valuable time. The starting platform absorbs all the propulsion forces and acts as an initial guidance system for the machine.
Vision for Swissloop Tunneling
Swissloop Tunneling's vision is to overthrow the status quo of the tunneling industry and make tunneling more sustainable, affordable, and faster. Therefore, Swissloop Tunneling is conducting research on new and innovative boring mechanisms. The goal of Groundhog Alpha is to increase tunneling speed and validate our processes which will significantly reduce tunneling costs in the future.
The vision of Swissloop Tunneling goes well beyond the boundaries of the competition. Subsequent iterations of the machine are already being planned and will be demonstrated at our tunneling facilities in Switzerland over the next few years:
Swissloop Tunneling aims to build Hyperloop tunnels with a diameter of 4.5 meters by 2035. On the way toward this goal, various innovative solutions will be developed, with the intention to use them for various other tunneling applications.
Technical Specifications
Length | 7.1 m |
Mass | 2.4 t |
Diameter | 0.56 m |
Propulsion force | 200 kN |
Motor speed | 3600 rpm |
Cutterhead | 27 rpm |
Target Speed | 10 mm/s |
About the University Technology Exposure Program 2022
Wevolver, in partnership with Mouser Electronics and Ansys, is excited to announce the launch of the University Technology Exposure Program 2022. The program aims to recognize and reward innovation from engineering students and researchers across the globe. Learn more about the program here.
