CAN FD: Revolutionizing Automotive and Industrial Communications
A re-development of classical CAN by Bosch in 2012, CAN FD is the protocol that operates all moving machines like cars, planes, robots, etc. This guide will unfold its foundational concepts, recent advancements, practical applications, and the challenges, for engineering professionals.

04 Jul, 2024. 20 minutes read

Introduction
In today's world, where cars and industrial systems are becoming more advanced while catching up with technology, there's a need for faster and more efficient ways to share data. This is where CAN FD protocol, or Flexible Data-rate, steps in.
Developed by Bosch in 2012, CAN FD is an upgrade to the original CAN system specified in ISO 11898-1. It allows data to be sent at higher speeds, making it more competent than its predecessor. CAN FD is especially useful in the automotive industry, where vehicles now have numerous sensors and modules that all need to communicate quickly and reliably.
But it’s not just for cars. CAN FD is also great for industrial automation, medical devices, and any other field where fast and reliable data communication is a must. As our technology continues to advance, CAN FD will be a key player in making sure our systems communicate efficiently and effectively.
In the automotive industry, CAN FD supports sophisticated features like advanced driver-assistance systems (ADAS) and infotainment, enabling faster and more reliable communication between electronic control units (ECUs). Similarly, in industrial environments, CAN FD facilitates improved control and monitoring of automated systems. With the continuous evolution of systems and the growing need for data-heavy applications, CAN FD is set to become a key technology that will drive the next wave of innovation and performance in embedded communication networks.
From CAN to CAN FD: Understanding the Evolution
Basics of CAN
The original CAN (Controller Area Network) protocol, developed by Bosch in the 1980s, was designed for efficient communication between various Electronic Control Units (ECUs) within a vehicle. Its primary purpose was to reduce the wiring complexity by allowing multiple ECUs to communicate over a single two-wire bus system. This innovation upgraded in-vehicle networking, making CAN an industry-standard in automotive communication.
The key features of CAN include:
- A bit rate of up to 1 Mbit, which was sufficient for the needs of early automotive applications.
- Use a multi-master, message-oriented transmission scheme where nodes can send and receive messages on the physical layer.
- Arbitration is handled using a Carrier Sense Multiple Access with Collision Detection (CSMA/CD) method, which ensures that if two or more ECUs start transmitting at the same time, the one with the highest priority (lowest identifier) will get the bus access. The CAN FD controller is responsible for controlling the transmission and reception of messages.
- Error handling involving mechanisms such as error detection, signaling, and fault confinement.
- Error detection is achieved through methods like Cyclic Redundancy Checks (CRC), bit stuffing, and frame checks. When an error is detected, it is flagged, and the message is retransmitted. Nodes that repeatedly cause errors are moved to a passive state or removed from the network, maintaining overall network integrity.
However, the CAN protocol has limitations, particularly in terms of data transmission speed and payload capacity. With a maximum bit rate of 1 Mbps and a payload size limited to 8 bytes, CAN struggles to meet the demands of modern automotive and industrial applications that require higher data throughput and larger message sizes. These constraints necessitated the development of an enhanced protocol, leading to the introduction of CAN FD.
Introduction to CAN FD
As vehicles and industrial machines have evolved, the need for more sophisticated communication networks has become evident. The primary motivation behind developing CAN FD (Controller Area Network with Flexible Data Rate) was to overcome the limitations of the original CAN protocol in handling the increasing complexity and data requirements of contemporary systems. This is how CAN FD serves to be an imrovement over the traditional CAN [1]:
- Higher Data Rates: Unlike the traditional CAN protocol, which is limited to a maximum bit rate of 1 Mbps and a payload size of 8 bytes, CAN FD significantly enhances these capabilities.
- Increased Data Capacity: It supports bit rates up to 8 Mbps in the data phase and allows for payloads of up to 64 bytes. These improvements facilitate faster data transmission, which is critical for applications requiring high-speed communication and large data packets.
- Enhanced Error Detection and Correction: CAN FD introduces improvements in error detection and correction mechanisms, such as a cyclic redundancy check (CRC) and a stuff count, enhancing the reliability of data communication
- Faster ECU Reprogramming: The higher bit rates and larger payloads of CAN FD facilitate faster reprogramming of Electronic Control Units (ECUs), which is crucial for modern automotive applications
- Seamless Transition: CAN FD allows for a seamless transition from traditional CAN, as it retains the same frame formats and can switch to faster bit rates during data transmission phases
Advanced Driver Assistance Systems (ADAS), autonomous driving technologies, and modern industrial automation systems all require a robust communication protocol capable of transmitting larger volumes of data at higher speeds. CAN FD meets these requirements by providing an enhanced protocol that supports higher data rates and greater payload capacity, ensuring that the communication needs of modern systems are met effectively and efficiently.
Recommended Readings: Understanding CAN Bus: A Comprehensive Guide
Cutting-Edge Advancements in CAN FD Technology
Increased Data Rates and Efficiency
CAN FD’s enhanced data rates are crucial for modern applications that require high-speed communication. While the original CAN protocol supports a maximum bit rate of 1 Mbps, CAN FD achieves bit rates up to 8 Mbps during the data phase. This substantial increase in data rate allows for faster transmission of messages, reducing latency and improving overall network efficiency.
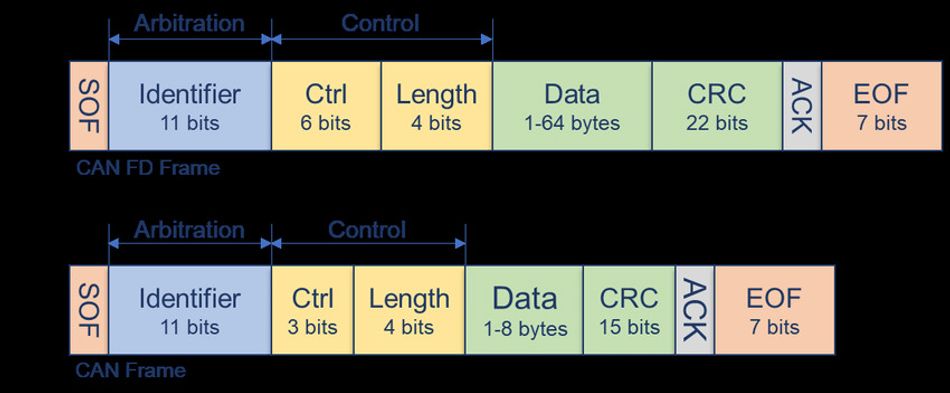
The underlying technical improvements that facilitate these enhanced data rates include changes in the frame structure and the introduction of bit rate switching [2]. In CAN FD, the arbitration phase operates at the nominal bit rate, similar to the original CAN protocol. However, during the data phase, the bit rate switches to a higher rate, allowing for quicker data transmission. This dual-rate approach maximizes efficiency without compromising the reliability of the arbitration process.
Another critical improvement is the flexible data length code (DLC) in CAN FD, which allows for payloads of up to 64 bytes compared to the 8-byte limit in CAN. This increased payload capacity means that more data can be transmitted in a single frame, reducing the overhead associated with sending multiple smaller frames. The result is a more efficient use of the network bandwidth and a significant boost in data throughput [3].
For example, in automotive applications, CAN FD enables advanced driver-assistance systems (ADAS) to exchange large volumes of sensor data rapidly and reliably, which is essential for real-time processing and decision-making. Simmilarly, in industrial automation, CAN FD supports high-speed communication between controllers and field devices, enhancing the automation process.
Case studies have demonstrated the practical benefits of CAN FD's enhanced data rates and efficiency. One notable example is the integration of CAN FD in electric vehicle (EV) battery management systems. With CAN FD, these systems can transmit detailed battery status information, such as temperature and charge levels, at high speeds, enabling more precise monitoring and control. This capability ensures optimal battery performance and longevity, which is critical for the reliability and efficiency of EVs [4].
In summary, the increased data rates and efficiency provided by CAN FD represent a significant advancement over the traditional CAN protocol. These improvements address the growing demands for high-speed communication and large data payloads in various modern applications, driving innovation and enhancing performance across multiple industries.
Enhanced Error Detection and Correction Mechanisms
In network communication, especially in automotive and industrial systems, error detection and correction mechanisms ensure reliable data transmission. The original CAN protocol, while revolutionary at its time, had certain limitations in its error-handling capabilities. It employed a 15-bit CRC (Cyclic Redundancy Check) for error detection, which, though effective, left room for improvement as data requirements grew more complex and error-prone [5][6]. CAN FD addresses these limitations with significant advancements.
One of the primary enhancements is the adoption of a more sophisticated CRC algorithm. Depending on the frame length, CAN FD uses a 17-bit or 21-bit CRC, providing a higher degree of error detection capability. This reduces the probability of undetected errors in transmitted messages, ensuring that the data integrity is maintained even in more demanding environments.
In addition to the improved CRC algorithm, CAN FD incorporates advanced error confinement strategies that further bolster the protocol's robustness. The protocol defines specific error states that a node can enter based on its error count.
- Error Active,
- Error Passive,
- Bus Off
These states help isolate faulty nodes, preventing them from disrupting network communication. For instance, a node in the Error Passive state can still participate in communication but with limited capabilities. On the othr hand, a node in the Bus Off state is completely isolated from the network until it recovers from its errors. This strategic isolation is vital in complex systems where uninterrupted communication is required.
Moreover, CAN FD enhances error detection through sophisticated mechanisms during both the arbitration and data phases. The protocol includes methods for detecting bit errors, bit stuffing errors, frame check errors, and acknowledgment errors. When an error is detected, the erroneous message is immediately flagged, and the transmitting node is notified to resend the message. This real-time error handling ensures that only accurate data is transmitted, maintaining the integrity of the network.
The use of bit monitoring and protocol violation checks further strengthens CAN FD's error detection capabilities. Bit monitoring ensures that the transmitted bits match the expected bits on the bus, while protocol violation checks ensure that all nodes adhere to the defined communication rules. These combined mechanisms enhance the protocol's ability to detect and correct errors more effectively than the original CAN protocol.
By integrating these advanced error detection and correction mechanisms, CAN FD provides a more reliable and robust communication protocol. These improvements are crucial for modern automotive and industrial applications, where the accuracy and reliability of data transmission are non-negotiable. The enhancements in CAN FD ensure that it can meet the higher demands of today's complex systems, making it a critical component in the evolution of network communication technologies.
Integration with Modern Automotive and Industrial Systems
CAN FD integrates seamlessly with current automotive and industrial systems, providing enhanced communication capabilities that meet the increasing demands of modern technology. A critical component of this integration involves updating the Electronic Control Units (ECUs) within these systems. ECUs, which manage various functions such as engine control, transmission, and advanced driver-assistance systems (ADAS), need to be compatible with the higher data rates and larger payload capacities that CAN FD offers. This often requires updating the firmware and hardware of existing ECUs to support CAN FD's advanced features, including the ability to handle more bytes of data and a higher baud rate.
In addition to ECU updates, network architecture changes are essential for effectively integrating CAN FD. Traditional CAN networks are structured to handle the data rates and payload sizes of the original CAN protocol, which are significantly lower than those of CAN FD. To accommodate CAN FD, network architectures must be re-evaluated and redesigned to ensure they can manage the increased data throughput and efficiency. This includes upgrading transceivers, adjusting bus lengths, and ensuring proper termination to maintain signal integrity at higher speeds.
One of the notable advantages of CAN FD is its backward compatibility with existing CAN networks. This means that CAN FD nodes can coexist with traditional CAN nodes on the same network, provided certain conditions are met. For instance, CAN FD frames can be transmitted alongside CAN frames, with the arbitration phase operating at the nominal bit rate to ensure compatibility. However, during the data phase, the bit rate switches to a higher speed, which traditional CAN nodes cannot process. As a result, existing CAN nodes will ignore CAN FD frames after the arbitration phase, allowing both protocols to coexist without interference. This is especially beneficial for networks that use ethernet for high-speed data transfer, ensuring that the CAN FD bus operates seamlessly alongside other communication protocols.
To achieve this backward compatibility, several technical adjustments are necessary. These include configuring the network to handle mixed CAN and CAN FD traffic and ensuring that all nodes recognize and correctly process the different frame types. Additionally, system designers must ensure that the network timing and synchronization are maintained to prevent data collisions and ensure reliable communication.
The integration of CAN FD into modern systems is not without challenges, but the benefits far outweigh the complexities. By enabling higher data rates and larger payloads, CAN FD supports the sophisticated functionalities of contemporary automotive and industrial applications, such as real-time sensor data processing, enhanced diagnostics, and more efficient control systems. These advancements not only improve performance but also pave the way for future innovations in vehicle and industrial automation.
Real-World Applications of CAN FD in Engineering
Automotive Industry
CAN FD plays a pivotal role in the automotive industry, enabling advanced functionalities that enhance vehicle performance, safety, and user experience. One of the key applications of CAN FD is in Advanced Driver-Assistance Systems (ADAS). These systems rely on a multitude of sensors and cameras to provide real-time data for functions such as adaptive cruise control, lane-keeping assistance, and automatic emergency braking. CAN FD’s higher data rates and larger payload capacities are crucial for transmitting the vast amounts of data generated by these sensors quickly and reliably. This ensures that the ADAS can process information in real-time, making split-second decisions that enhance driver safety.
In addition to ADAS, CAN FD is integral to modern infotainment systems. These systems combine navigation, audio, video, and internet connectivity, requiring robust data communication to function seamlessly. CAN FD’s enhanced data throughput allows for high-quality media streaming and quick navigation updates, providing a superior in-car entertainment experience. The ability to handle large data packets efficiently ensures that infotainment systems remain responsive and user-friendly, even as the demand for more complex features grows.
Powertrain control is another critical area where CAN FD makes a significant impact. Modern powertrain systems manage the engine, transmission, and other critical components to optimize vehicle performance and fuel efficiency. CAN FD enables precise control and monitoring of these systems by providing fast and reliable communication between the various electronic control units (ECUs). The improved data rates and error correction capabilities of CAN FD ensure that commands and feedback are transmitted accurately, leading to better engine performance and reduced emissions.
Technical implementation of CAN FD in automotive networks involves several key considerations. Network topology, for instance, must be designed to accommodate the higher data rates and ensure minimal signal degradation. Typically, a star or hybrid topology is used, where central ECUs communicate with multiple nodes. This setup helps maintain signal integrity and reduces the risk of data collisions.
Node configuration is also crucial in a CAN FD network. Each node must be capable of handling the increased data load and higher bit rates. This often requires upgrading the hardware and software of existing nodes to ensure compatibility with CAN FD standards. Additionally, nodes must be configured to prioritize critical data, ensuring that essential information, such as safety alerts from ADAS, is transmitted with minimal latency.
Data handling in CAN FD networks involves efficient management of the larger payloads and faster transmission speeds. This requires advanced buffering techniques and error-handling protocols to manage the increased data flow without compromising reliability. Implementing these technical enhancements ensures that the automotive systems can fully leverage the benefits of CAN FD, resulting in improved performance, safety, and user satisfaction.
Suggested Readings: How Advanced Driver-Assistance Systems (ADAS) Impact Automotive Semiconductors
Industrial Automation
In industrial automation, CAN FD has become a vital component, enhancing the efficiency and reliability of control systems. Industrial environments often require robust CAN communication networks to manage and monitor machinery and processes. CAN FD’s ability to support higher data rates and larger payloads makes it ideally suited for these demanding applications.
One of the primary uses of CAN FD in industrial automation is in the control of complex machinery. For example, in a manufacturing plant, various machines such as robotic arms, conveyor belts, and CNC (Computer Numerical Control) machines need to operate in a highly synchronized manner. CAN FD enables real-time communication between these machines, ensuring precise coordination and control. The protocol's high data rate allows for the rapid transmission of control commands and feedback signals, minimizing latency and improving operational efficiency.
In the context of process control, CAN FD networks facilitate the integration of various sensors and actuators that monitor and regulate industrial processes. For instance, in a chemical processing plant, CAN FD can be used to connect temperature sensors, pressure transducers, and flow meters to a central control unit. This setup allows for real-time monitoring and adjustment of the process parameters, ensuring optimal conditions are maintained. The increased payload capacity of CAN FD is particularly beneficial in these scenarios, as it allows for the transmission of detailed sensor data, enhancing the accuracy of process control.
Technical examples of CAN FD networks in industrial environments highlight its versatility and robustness. Integrating CAN FD into an industrial protocol stack involves ensuring compatibility with existing systems and standards. For example, CANopen, a widely used protocol in industrial automation, has been extended to support CAN FD, allowing for seamless integration. This extension involves updating the protocol stack to handle the higher data rates and larger frame sizes of CAN FD, ensuring backward compatibility with existing CAN-based systems.
Real-time data processing is another critical aspect where CAN FD excels. In automated production lines, the ability to process data in real-time is essential for maintaining high productivity and quality control. CAN FD's enhanced data throughput allows for the rapid collection and analysis of data from various points in the production line. This capability supports advanced applications such as predictive maintenance, where data from machinery is continuously analyzed to predict and prevent potential failures.
Overall, the utilization of CAN FD in industrial automation and control systems provides significant advantages in terms of data transmission speed, reliability, and system integration. These improvements help industries achieve higher efficiency, better process control, and enhanced operational safety, making CAN FD an indispensable technology in the modern industrial landscape.
Recommended Readings: What is an Autonomous Vehicle: A Comprehensive Guide to its Engineering Principles and Applications
Robotics and Embedded Systems
In the fields of robotics and embedded systems, CAN FD plays a crucial role by providing the high-speed, reliable communication required for complex, data-intensive operations. One of the primary technical advantages of CAN FD in these applications is its ability to significantly reduce latency. This low-latency communication is essential for real-time control and feedback loops in robotics, where milliseconds can make the difference between smooth operation and failure.
For instance, in robotic arms used for precision tasks in manufacturing, CAN FD enables rapid transmission of control signals and sensor feedback. This high-speed communication ensures that the robotic arm can make fine adjustments in real time, maintaining accuracy and efficiency. The increased data throughput of CAN FD also allows for the transmission of richer datasets, which can include detailed sensory information necessary for advanced functionalities like machine learning and adaptive control.
Embedded systems, which are integral to various applications from automotive to consumer electronics, also benefit from CAN FD's capabilities. These systems often require reliable communication between multiple microcontrollers and sensors. CAN FD's larger payload capacity and higher data rates facilitate efficient data exchange, enabling more sophisticated processing and decision-making within embedded systems.
A specific technical implementation of CAN FD in embedded systems can be seen in autonomous drones. These drones rely on multiple sensors, including GPS, cameras, and accelerometers, to navigate and perform tasks. CAN FD provides the necessary bandwidth to handle the data from these sensors, ensuring that the control system receives timely and accurate information. This capability is critical for functions such as obstacle avoidance and precise navigation.
Moreover, the configuration of CAN FD networks in robotics and embedded systems often involves star or hybrid topologies to optimize data flow and minimize latency. In these configurations, a central node, such as a master controller, communicates with multiple peripheral nodes, each managing specific sensors or actuators. This setup not only streamlines communication but also enhances the system's fault tolerance, as the failure of a single node does not compromise the entire network.
The use of CAN FD in these applications also includes advanced error detection and correction mechanisms, ensuring that data integrity is maintained even in noisy environments. This robustness is vital for embedded systems operating in harsh conditions, such as industrial robots or outdoor drones, where reliable performance is non-negotiable.
In summary, the role of CAN FD in robotics and embedded systems is pivotal, providing the high-speed, low-latency communication required for advanced control and data processing. By enabling efficient and reliable data exchange, CAN FD supports the development and deployment of sophisticated robotic and embedded systems, driving innovation and enhancing performance across various industries.
Overcoming Challenges in CAN FD Implementation
Technical Hurdles
Implementing CAN FD in existing systems poses several technical challenges, particularly concerning hardware and software integration.
Selecting Transceivers
One of the primary hardware challenges is selecting appropriate transceivers that can handle the higher data rates and increased complexity of CAN FD. Traditional CAN transceivers are often inadequate for CAN FD, necessitating the use of specialized transceivers designed to support the enhanced protocol. These transceivers must be capable of managing the higher bit rates and providing robust error detection and correction to maintain data integrity.
Firmware Upgrade
Software integration presents another significant challenge. Upgrading the firmware of existing Electronic Control Units (ECUs) to support CAN FD requires meticulous planning and execution. Firmware updates must ensure compatibility with CAN FD’s advanced features, such as flexible data-rate switching and larger payload capacities. This process often involves extensive testing to verify that the updated software can handle the increased data throughput without introducing latency or errors.
Solutions to these challenges include several best practices. Firstly, selecting the right transceivers is crucial. Transceivers should be chosen based on their ability to support high-speed data transmission and their compatibility with existing network architectures. For instance, transceivers from manufacturers like NXP that offer robust error handling and diagnostic features can significantly reduce integration issues.
Network Design
Optimizing network design is another critical solution. CAN FD networks must be carefully planned to ensure minimal signal degradation and efficient data flow. This involves considering factors such as bus length, topology, and termination. A star topology or hybrid topology often proves effective, as it centralizes communication paths and reduces the risk of data collisions. Additionally, ensuring proper termination at the ends of the bus lines helps maintain signal integrity and reduces reflections that can cause data errors.
Firmware Compatibility
Ensuring firmware compatibility involves a thorough approach to software updates. This includes not only updating the firmware but also conducting comprehensive testing to identify and resolve any potential issues. Using simulation tools to model the CAN FD network can help engineers predict how the updated system will behave under various conditions, allowing them to make necessary adjustments before deployment. Furthermore, establishing a rollback mechanism ensures that systems can revert to their previous state in case the firmware update encounters unforeseen problems.
In conclusion, overcoming the technical hurdles of implementing CAN FD requires a combination of careful hardware selection, optimized network design, and meticulous software integration. By adhering to these best practices, engineers can successfully upgrade their systems to leverage the advanced capabilities of CAN FD, thereby enhancing performance, reliability, and efficiency in modern automotive and industrial applications.
Cost Considerations
Adopting CAN FD involves several cost implications that organizations must consider, including hardware upgrades, software development, and training. Understanding these costs is essential to evaluate the feasibility and benefits of transitioning to this advanced communication protocol.
Hardware Upgrades
One of the primary cost factors is the need for hardware upgrades. Existing CAN-based systems may require new transceivers and controllers capable of supporting CAN FD's higher data rates and larger payload capacities. These components are generally more expensive than traditional CAN hardware due to their enhanced performance and capabilities. Additionally, upgrading the network infrastructure to accommodate CAN FD might involve replacing or reconfiguring existing wiring and connectors to ensure optimal signal integrity and data transmission efficiency.
Software Upgrades
Software development is another significant cost component. Integrating CAN FD into existing systems often requires extensive firmware updates and software modifications. This process includes updating the firmware of ECUs (Electronic Control Units) to support CAN FD’s features, such as flexible data-rate switching and advanced error detection mechanisms. Developing and testing this software to ensure it operates seamlessly with the new hardware can be time-consuming and costly.
Training
Training is a crucial aspect that organizations must account for when adopting CAN FD. Engineers and technicians need to be trained on the new protocol’s intricacies and best practices for implementation and maintenance. This training ensures that the team can effectively manage and troubleshoot the upgraded systems. Investing in comprehensive training programs helps to minimize errors and maximize the efficiency and reliability of the CAN FD network.
While the initial costs of adopting CAN FD can be substantial, comparing these costs with the benefits provides a balanced perspective. One of the most significant benefits is the enhanced performance and reliability of the communication network. CAN FD’s higher data rates and larger payloads enable more efficient data transmission, reducing latency and improving the overall responsiveness of the system. This performance boost is particularly valuable in applications requiring real-time data processing, such as advanced driver-assistance systems (ADAS) and industrial automation.
ROI
The potential Return on Investment (ROI) is another critical factor to consider. By adopting CAN FD, organizations can achieve significant long-term savings and benefits. For instance, the improved efficiency and reliability can lead to reduced downtime and maintenance costs. Additionally, the ability to handle larger data volumes more effectively supports the integration of advanced features and functionalities, potentially leading to increased market competitiveness and revenue.
ROI calculations should also consider the scalability and future-proofing aspects of CAN FD. As data requirements continue to grow, systems based on traditional CAN protocols may struggle to keep up, necessitating further costly upgrades. In contrast, CAN FD provides a scalable solution that can accommodate future data demands, thereby offering long-term value and reducing the need for frequent updates.
In summary, while the initial costs of adopting CAN FD include hardware upgrades, software development, and training, the long-term benefits and potential ROI make it a worthwhile investment. By enhancing system performance, reliability, and scalability, CAN FD supports the efficient and effective operation of modern automotive and industrial applications, ultimately providing a significant return on the initial investment.
Compatibility and Standardization Issues
Implementing CAN FD in existing systems involves addressing various compatibility issues, particularly with legacy CAN networks. CAN FD is designed to be backward compatible with traditional CAN networks to a certain extent, allowing for a gradual transition. However, integrating CAN FD with legacy systems requires careful consideration of several factors to ensure seamless interoperability.
Data Frames
One of the primary compatibility challenges is the difference in data rates and frame structures between CAN and CAN FD. While CAN FD can operate at much higher data rates and support larger payloads, traditional CAN networks are limited to a maximum bit rate of 1 Mbps and a maximum payload size of 8 bytes. To maintain compatibility, CAN FD frames are designed to be recognizable by CAN nodes, but CAN nodes cannot process the extended data frames of CAN FD. Therefore, network designs must ensure that CAN FD frames do not disrupt the operation of existing CAN nodes. This typically involves using a mixed network where both CAN and CAN FD frames are present but managed in such a way that the legacy CAN nodes only handle the frames they are designed to process.
Synchronization
Another critical aspect is the synchronization and timing issues that arise when integrating CAN FD into a CAN network. CAN FD introduces the concept of dual bit rates, where the arbitration phase runs at the standard CAN speed, and the data phase runs at a higher speed. This dual-rate operation can lead to synchronization issues if not properly managed. Engineers must ensure that all nodes in the network, whether CAN or CAN FD, are correctly synchronized to avoid data collisions and ensure reliable communication.
Standadization
The role of standardization bodies such as ISO (International Organization for Standardization) and SAE (Society of Automotive Engineers) is crucial in promoting CAN FD adoption and ensuring interoperability. These organizations develop and maintain standards that define the specifications and requirements for CAN FD implementation. ISO 11898-1:2015, for example, specifies the data link layer and physical signaling for CAN FD, providing guidelines for implementing CAN FD in a way that ensures compatibility and interoperability with existing CAN networks.
Standardization bodies also facilitate the development of certification processes and testing protocols to verify that CAN FD implementations meet the required standards. This helps manufacturers and engineers ensure that their CAN FD products and systems will operate reliably and interoperably in diverse environments. By adhering to these standards, industries can achieve a consistent and high level of performance across different implementations and applications.
In conclusion, addressing compatibility issues with existing systems is a significant challenge in CAN FD implementation. Ensuring seamless integration with legacy CAN networks requires careful management of data rates, frame structures, and synchronization. The role of standardization bodies like ISO and SAE is essential in providing the guidelines and standards necessary for successful CAN FD adoption, promoting interoperability, and maintaining the reliability and performance of communication networks.
Conclusion
CAN FD represents a significant advancement in communication protocols, addressing the limitations of the traditional CAN protocol with higher data rates, increased payload capacities, and improved error detection and correction mechanisms. These enhancements make CAN FD particularly suited for modern automotive, industrial, and embedded system applications where reliable, high-speed communication is essential. By integrating CAN FD, industries can achieve more efficient and robust data transmission, paving the way for innovative functionalities and improved system performance.
Frequently Asked Questions (FAQs)
What is the primary advantage of CAN FD over CAN?
The primary advantage of CAN FD over the traditional CAN protocol lies in its enhanced data rates and increased payload capacity. CAN FD can achieve data rates up to 8 Mbps compared to CAN's 1 Mbps, and it supports payloads up to 64 bytes, significantly more than CAN's 8-byte limit. These improvements result in faster and more efficient data transmission, crucial for applications requiring high-speed communication.
How does CAN FD improve data transmission rates?
CAN FD improves data transmission rates through changes in frame format and bit timing. The protocol allows for a flexible data-rate switching mechanism where the arbitration phase occurs at the standard CAN speed, but the data phase can switch to a higher bit rate. This dual-rate approach maximizes efficiency and reduces latency. Additionally, the extended data length capability allows more data to be transmitted in a single frame, further enhancing transmission efficiency.
Is CAN FD backward compatible with traditional CAN systems?
Yes, CAN FD is designed to be backward compatible with traditional CAN systems to a certain extent. CAN FD nodes can coexist with CAN nodes on the same network, with the arbitration phase operating at the standard CAN speed to ensure compatibility. However, CAN nodes will not process the extended data frames of CAN FD. Proper network configuration and adjustments, such as mixed network management and synchronization, are necessary to maintain compatibility.
What industries benefit most from CAN FD technology?
Several industries benefit significantly from CAN FD technology, including:
- Automotive: Enhanced data rates and payload capacities support advanced driver-assistance systems (ADAS), infotainment, and powertrain control.
- Industrial Automation: Efficient real-time data processing and control for complex machinery and process control.
- Robotics and Embedded Systems: Low-latency communication and high data throughput for precise control and real-time feedback.
- Healthcare: Reliable and high-speed data transmission for medical devices and diagnostics.
What are the common challenges faced during CAN FD implementation?
Common challenges during CAN FD implementation include:
- Hardware Compatibility: Selecting appropriate transceivers and controllers that support higher data rates.
- Software Updates: Upgrading firmware and software to handle CAN FD’s features and ensuring compatibility.
- Network Configuration: Designing network topologies and ensuring synchronization to prevent data collisions.
- Training: Ensuring that engineers and technicians are trained to manage and maintain the upgraded systems effectively.
References
[1] Wikipedia.CAN FD versus classical CAN. Link
[2] KVaser. Bit Rate Switching. Link
[3] KVaser. Data Length Codes up to 64 bytes of data. Link
[4] CSSelectronics. Electric Vehicle Data Logger - Cloud Battery/BMS Telematics. Link.
[5] KVaser.CAN Error Handling. Link
[6] Bosch. Advantages of CAN FD Error detection mechanisms compared to Classical CAN. Link.
in this article
1. Introduction2. From CAN to CAN FD: Understanding the Evolution3. Cutting-Edge Advancements in CAN FD Technology4. Integration with Modern Automotive and Industrial Systems5. Real-World Applications of CAN FD in Engineering6. Overcoming Challenges in CAN FD Implementation7. Conclusion8. Frequently Asked Questions (FAQs)9. References