Featuredpodcast
In this episode, we discuss a joint endeavor led by ETH Zurich to leverage robotic teams to explore the lunar surface for precious materials.

In this episode, we discuss a joint endeavor led by ETH Zurich to leverage robotic teams to explore the lunar surface for precious materials.
In this episode, we discuss a joint endeavor led by ETH Zurich to leverage robotic teams to explore the lunar surface for precious materials.
Unitree launched its first humanoid robot H1 on August 15. Showcasing six months of hard work, the H1 humanoid stands about 71 inches (1800mm) tall, but only weighs about 100 lbs (47kg) and boasts unmatched power.
On 12 July, Unitree unveiled its latest quadruped robot - the Unitree Go2, which features embodied AI technology, standard 4D ultra-wide LiDAR and GPT empowerment. This product is expected to revolutionize the consumer-grade quadruped robots industry, leading to a transformation of the sector.

Quadruped Robot
Unitree is a world-renowned robotics company focusing on the independent de...
3 Posts
In this episode, we discuss a joint endeavor led by ETH Zurich to leverage robotic teams to explore the lunar surface for precious materials.

13 minutes read
Unitree launched its first humanoid robot H1 on August 15. Showcasing six months of hard work, the H1 humanoid stands about 71 inches (1800mm) tall, but only weighs about 100 lbs (47kg) and boasts unmatched power.

2 minutes read
On 12 July, Unitree unveiled its latest quadruped robot - the Unitree Go2, which features embodied AI technology, standard 4D ultra-wide LiDAR and GPT empowerment. This product is expected to revolutionize the consumer-grade quadruped robots industry, leading to a transformation of the sector.
3 minutes read
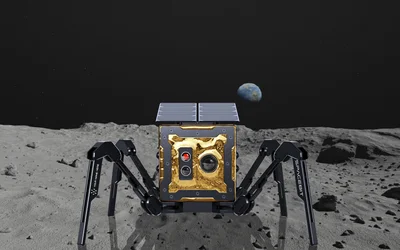
Swiss engineers are training legged robots for future lunar missions that will search for minerals and raw materials. To ensure that the robots can continue to work even if one of them malfunctions, the researchers are teaching them teamwork.

3 minutes read
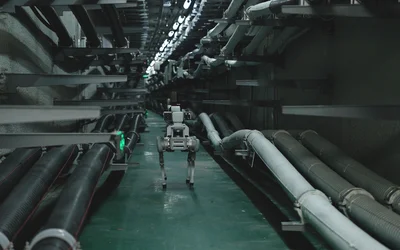
The X20 robot dog can perform automatic inspection tasks according to the preset path and tasks. During the inspection, the robot uses LiDAR and depth cameras to detect the terrain, and has the ability to turn around, climb stairs, and obstacle avoidance.

3 minutes read
Advanced mobility and modular functions allow complex moves such as front flipping.
3 minutes read
With the flexibility to deliver unmanned detection and rescue services, Jueying X20 is designed for the complex terrain of a post-earthquake landscape, the insides of vulnerable debris buildings, tunnel traffic accidents, and in toxic, hypoxia, and high-density smoke environments created by chemical pollution or disaster event.
“DribbleBot” can maneuver a soccer ball on landscapes such as sand, gravel, mud, and snow, using reinforcement learning to adapt to varying ball dynamics.
Could this be the time we say goodbye to robotic awkwardness and hello to seamless motion? This article highlights the groundbreaking concept of whole-body control, a coordinated robotic motion technique that resembles natural movement. Imagine a robot smoothly navigating its environment, performing tasks with grace and precision. This innovative approach allows for improved efficiency and greater versatility in real-world settings.
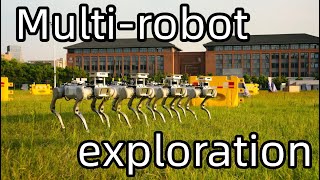
DEEP Robotics recently released its newest robotics technique, which is autonomous coordinated multi-robot exploration; the experiment is operated under a 3,000 m2 unknown environment with five Jueying X20 robot dogs.
2 minutes read
Aaron Johnson’s Robomechanics Lab has developed an open-source software that enables more agile movement in legged robots.

3 minutes read
A praying mantis for the moon, Mars and meteorites: the mantis-like robot "Mantis" is said to be able to independently explore planets and build an infrastructure with its claws.
ETH researchers led by Marco Hutter developed a new control approach that enables a legged robot, called ANYmal, to move quickly and robustly over difficult terrain. Thanks to machine learning, the robot can combine its visual perception of the environment with its sense of touch for the first time.
3 minutes read
Contribute to the development of a four-legged walking rover that is set to fly to the Moon with NASA in 2021 and 2022.

3 minutes read
How a hopping mouse and information theory could inform robotic locomotion.

4 minutes read