Coordinated multi-robot dog exploration in unknown environment
DEEP Robotics recently released its newest robotics technique, which is autonomous coordinated multi-robot exploration; the experiment is operated under a 3,000 m2 unknown environment with five Jueying X20 robot dogs.
09 Nov, 2022. 2 minutes read
DEEP Robotics recently released its newest robotics technique, of autonomous coordinated multi-robot exploration; the experiment occurred in a 3,000 m2 unknown environment with five Jueying X20 robot dogs. The experiment accomplished the coordinated exploration of eight targets along with its fully autonomous decision-making and planning. The purpose of the experiment is to seek out the infinite applicable potentials in the field of rescue and exploration.

During rescue and exploration, collecting information is often found insufficient in manned operations; operators often encounter difficult situations such as anoxia, toxic gas, landslip, etc. The quadruped robot can assist or replace operators to get into the complex and hazardous areas that wheel or tracked robots have difficulties accessing. The technique of coordinated quadruped robot exploration explored information and paths shared between robots, which enhanced exploration efficiency under unknown environments.
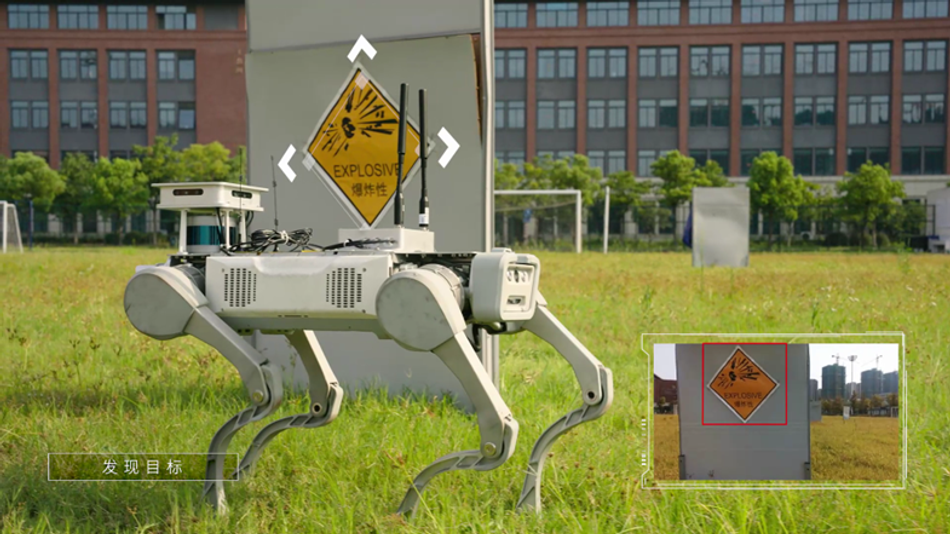
The technique of autonomous exploration under an unknown environment is a frontier in the research of robotics, in which specific movement coordination, like robot dance, is unable to compare with its quality and difficulty. Jueying robots were equipped with a high-resolution omnidirectional camera, Lidar, and mesh network during the experiment. The robots build the map together by Lidar and locating algorithm; they use the omnidirectional camera for deep learning and target recognition. Each robot dog autonomously assigns its unexplored area in real-time by the cooperative mechanism. In the progress of exploration, robots autonomously planned workable paths for obstacle avoidance; eventually pulled off coordinated robot exploration and target recognition in a largely unknown area.
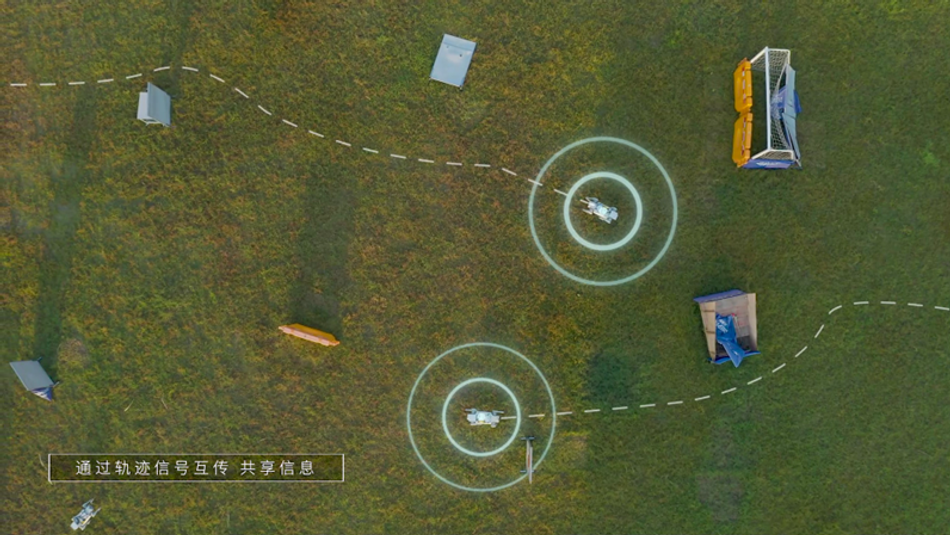
Tang Wei, the manager of the Perception algorithm department, introduced: The key to an efficient, coordinated exploration is the cooperative algorithm. The robots share the simplest and most useful information, which can gradually reduce bandwidth communication cost and enhance the system's adaptability under Bandwidth-constrained Conditions. The research was issued 2022 IEEE International Symposium on Safety, Security, and Rescue Robotics (SSRR2022).

DEEP Robotics is a leading quadruped robot company in Asia; the self-developed "Jueying" series robots are already applied in power inspection, public rescue, discovery, and other applicable fields with its advanced locomotion control algorithm, environmental perception, and AI algorithm. Besides the coordinated multi-robot exploration, DEEP Robotics has tried corporative operation with other forms of robots from the Huzhou institute of Zhejiang University in the "yellow dragon" cave.