Featured
Anti-Vandal Switches for Public HMIs (Human-Machine Interface).

Anti-Vandal Switches for Public HMIs (Human-Machine Interface).
Anti-Vandal Switches for Public HMIs (Human-Machine Interface).
Discover how 5G RedCap enables cost-efficient, low-power connectivity for industrial gateways and rugged IoT, bridging the gap between LTE and full 5G performance.
Murata EMI noise suppression devices help medical electronics maintain reliability, safety, and compliance by reducing high-frequency interference in compact high-power designs.
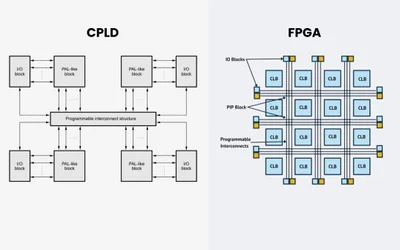
This article presents a comprehensive technical analysis of CPLD vs FPGA, focusing on their architectural distinctions, performance metrics, design flows, and implementation methodologies.
18 minutes read.
Anti-Vandal Switches for Public HMIs (Human-Machine Interface).
Discover how 5G RedCap enables cost-efficient, low-power connectivity for industrial gateways and rugged IoT, bridging the gap between LTE and full 5G performance.
Murata EMI noise suppression devices help medical electronics maintain reliability, safety, and compliance by reducing high-frequency interference in compact high-power designs.
Modernization Without Disruption: Preserving the Industrial Core While Enabling Innovation
Anti-Vandal Switches for Public HMIs (Human-Machine Interface).
Discover how 5G RedCap enables cost-efficient, low-power connectivity for industrial gateways and rugged IoT, bridging the gap between LTE and full 5G performance.
Murata EMI noise suppression devices help medical electronics maintain reliability, safety, and compliance by reducing high-frequency interference in compact high-power designs.
Modernization Without Disruption: Preserving the Industrial Core While Enabling Innovation
A decade-plus alliance between MIT's AgeLab and Toyota's Collaborative Safety Research Center is recognized as a key contributor to advancements in automotive safety and human-machine interaction.
This article presents a comprehensive technical analysis of CPLD vs FPGA, focusing on their architectural distinctions, performance metrics, design flows, and implementation methodologies.
Automation concepts cover a range of increasingly complex machine initiatives that enhance all areas of 21st century life, and are especially useful for streamlining commercial and production processes.
How can virtual reality (VR) be experienced haptically, i.e., through the sense of touch? This is one of the fundamental questions that modern VR research is investigating.
Discover the transformative shift in human-machine interaction as touchless technologies redefine how we interact with machines.
Balancing Innovation with Safety in the Age of Smart Mobility

5 minutes read
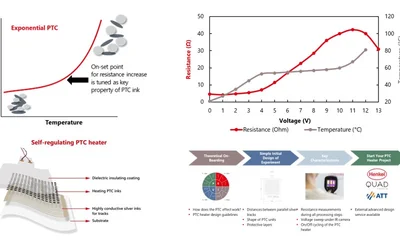
Heaters are one of the most successful applications of printed electronics. At first they seem deceptively simple, yet their successful realization is in fact an art relying on the interplay of all the elements from the right material selection to right design, right printing, etc. Learn how here.

6 minutes read
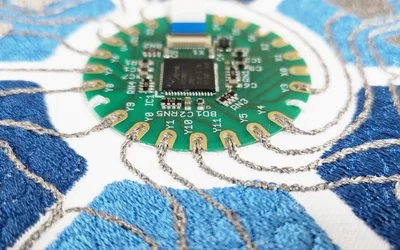
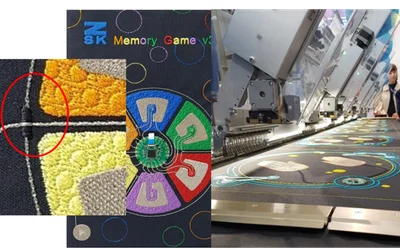
Embroidery was historically a means of adorning fabrics with intricate patterns,a testament to human skill.In the modern era, this ancient art form has significantly evolved, becoming a pioneering tech at the intersection of artistry & functionality. Learn here about Embroidered Electronics Textiles
6 minutes read
Distributed Control System(DCS) is vital in industrial automation due to its ability to centralize control, monitor processes in real-time, and ensure efficient and safe operations. It enhances process control, improves efficiency, and safeguards operational reliability for maximum productivity
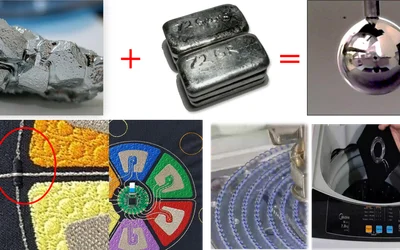
In this article you will learn more about liquid metals, a material that never ceases to amaze. It is water-like at room temperature but with metallic properties. Here you will see how researchers want to make them printable or turn them into conductive, stretchable, and washable fibers for e-textiles.
9 minutes read
Mass manufacturing electronic textiles and in doing so combining textile based wiring and sensors with PCB electronics is no easy task. In this article, you will learn about an innovative approach to enable embriodery of PCBs and conductive wiring/sensors in mass produced e-textiles
3 minutes read