The Swarm Robotic Platform MONA
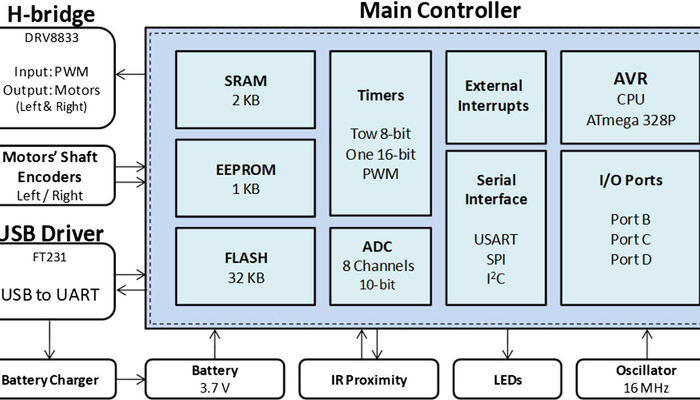
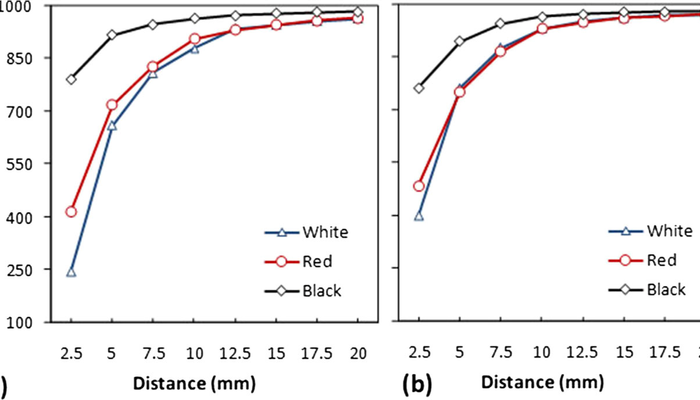
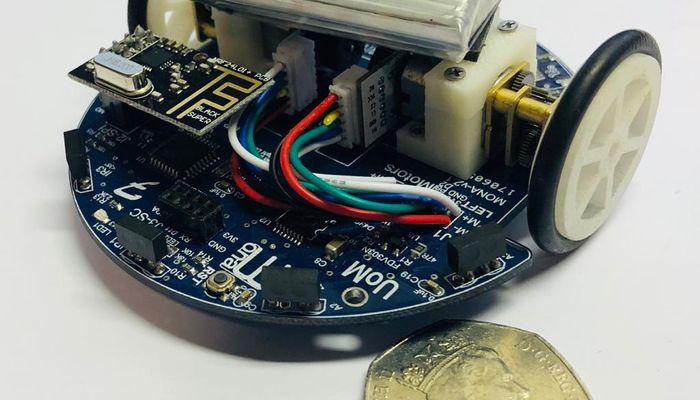
The MONA is a small, adaptable, cost-effective, robotic platform designed to be used within swarm robotics or taught engineering modules at University. Developed at the University of Manchester, it can be programmed via the Arduino IDE and is rechargeable all from one USB connection. The MONA contains 5 x IR sensors at 35 degree intervals along the front half of the PCB, which enable the sensing of walls and other robots, leading to obstacle avoidance and maze solving. Each of these sensors is connected to an ADC on the ATmega328p microcontroller, which some of you will recognise as the microcontroller used for the Arduino mini/pro. This gives access to a range of open-source libraries and functions through the Arduino community that can be deployed onto the MONA with ease.
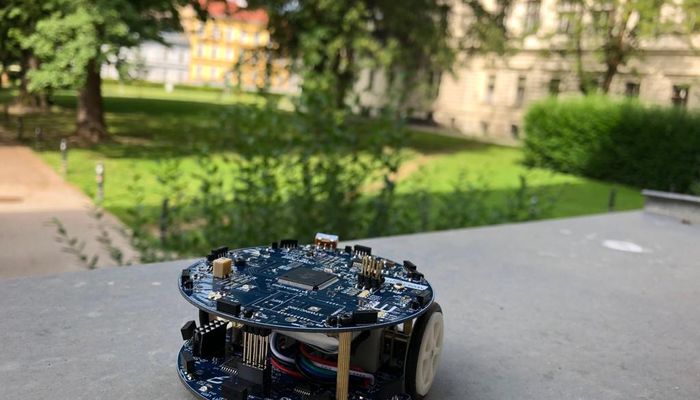
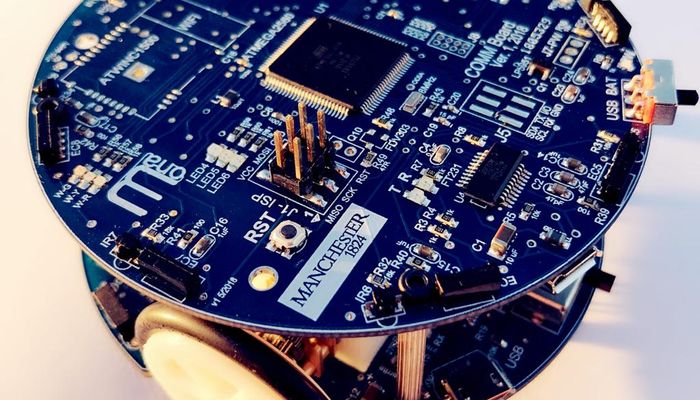
MONA out in the sun with a communications board
















Technical Specifications
| Dimensions | ~80 |
| Sensors | 5 |
| 2 | |
| Power | 1 |
| Chassis | |
| Processor | |
| Breakout | |
| Add-ons | |
Overview
The MONA contains 5 x IR sensors at 35 degree intervals along the front half of the PCB, which enable the sensing of walls and other robots, leading to obstacle avoidance and maze solving. Each of these sensors is connected to an ADC on the ATmega328p microcontroller, which some of you will recognise as the microcontroller used for the Arduino mini/pro. This gives access to a range of open-source libraries and functions through the Arduino community that can be deployed onto the MONA with ease.
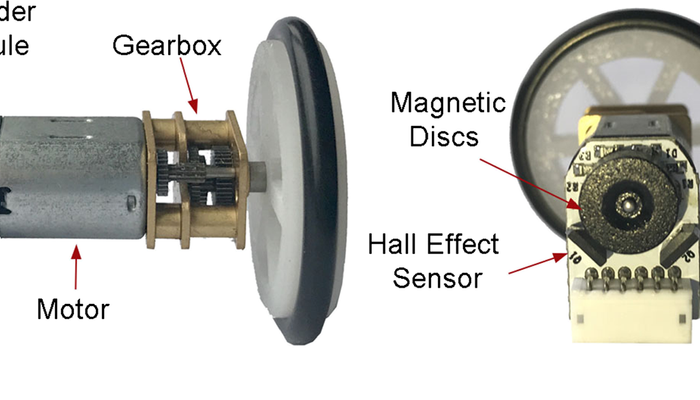
As well as the IR sensors, the MONA has magnetic hall effect encoders on each of the motors that offer feedback on the speed of the wheel, enabling fine control of speed, aiding low-level control of the MONA. It is not always easy to travel in a straight line without speed feedback, ask many an unfortunate robotics engineer! The motors themselves are brushed DC motors controlled via two PWM pins on the microcontroller. They produce some serious torque as the ratio is so high.
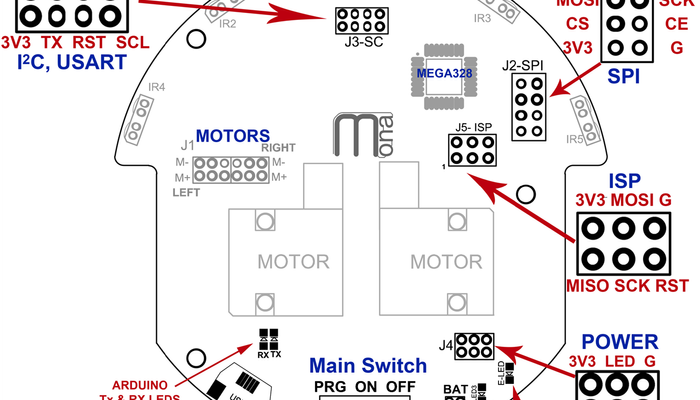
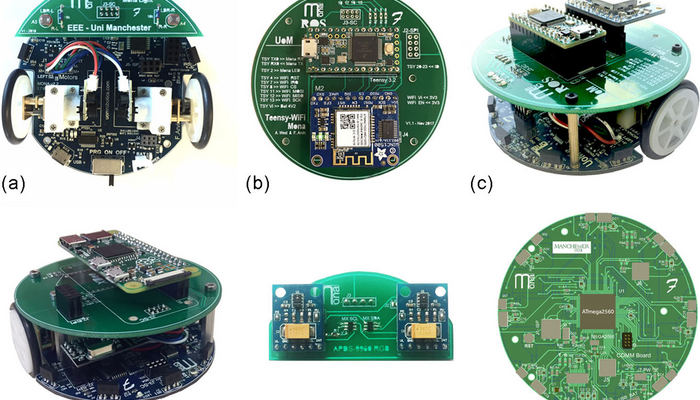
The MONA was designed to be as adaptable as possible with the base system offering a platform for development and improvement. Therefore, multiple breakout points on the MONA allow for the design of "add-on" boards to increase functionality. The SPI pins are broken out in such away as to make the MONA instantly compatible with the well-known and used nrf24l01 breakout board for wireless control, whilst the I2C and UART of the ATmega328p are also broken out to allow for many different interfaces to any innovative functionality engineers would like.
Example add-on boards that are either in development or already prototyped are:
- An IMU board
- A light-follower
- Wireless charging
- Inter-robot communications
- "ROS" board (works with ROS serial)
- Pi Zero breakout
There are also various ways to implement wireless control or feedback with experimentation conducted with a teensy breakout board with the also very popular XBee ecosystem.
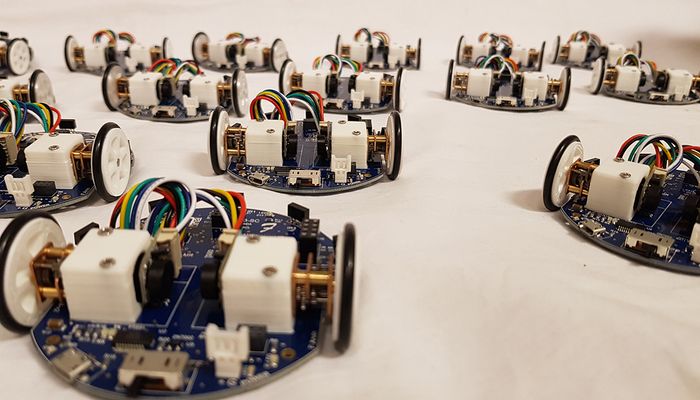
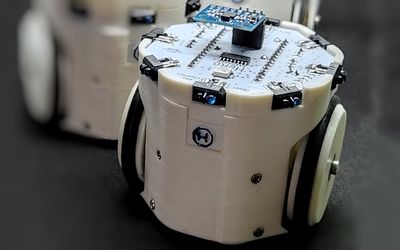
3D-printing has revolutionised prototyping but has also got to the stage that it can be integrated within products that normally it would be too weak for. In the case of the MONA, the wheels are 3D printed and push-fit, this allows the wheels to be replaced with other designs and sizes whilst the wheel grip is created through an o-ring placed in a groove around the outside of the wheel. The motor brackets are also 3D printed, enabling re-designs and easy removal and replacement. Of course, there is also a case, which as well as hiding the PCB, offers marker mounts to integrate into positioning systems such as the well-known Vicon systems, or, if you're like us, you can print out QR codes or other 2D markers to place on top of the MONA and track via a webcam using an OpenCV tracker.
It is hoped that these robots will help educate the next group of engineers whilst offering research institutions access to a swarm robot for their needs.
References
The Mona robot on the website of the commercial company Ice Nine Ltd. that offers the robot.
Presents the design of the Mona robot, a low-cost, open-source platform which has been developed for both teaching and research. Details of the robot’s application to research are presented.
Recommended Specs



Continue Reading

Thanks to software developed bicycle engineers can quickly calculate the most aerodynamic shape for a bike. The software applies artificial intelligence to a set of user-defined specifications. Engineers have used the program to design a bike that they hope will break the world speed record.

3 minutes read

Designed using off-the-shelf parts, a low-cost microcontroller, and a 3D-printed chassis, the HeRo 2.0 robot costs just $18 to build — and is at the heart of an effort to open swarm robotics up to a broader audience.


A newly created real-life Transformer is capable of reconfiguring its body to achieve eight distinct types of motion and can autonomously assess the environment it faces to choose the most effective combination of motions to maneuver.

3 minutes read
