Interbotix LoCoBot WX250
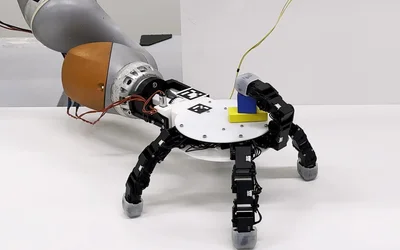
A research rover by Interbotix features Create 3 mobile platform, RealSense depth camera, 360-degree 2D LIDAR and WidowX 250 6DOF Robot Arm suitable for mapping, navigation and manipulation in educational and research applications.
Technical Specifications
| Manipulator | WIDOWX 250 6DOF |
| Payload (Create 3) | 2kg |
| Operating Time | 90 mins |
| Dimension | 35 x 35 x 63cm |
| Total Weight | 11.25kg |
| WIDOWX 250 6DOF | |
| Degrees Of Freedom | 6 |
| Reach | 680mm |
| Span | 1360mm |
| Repeatability | 1mm |
| Working Payload | 250g |
| Weight | 9.5lbs |
Overview
With their accurate form, robots are capable of working precisely in automated environments requiring precision and accurate outcomes—consequently reducing human physical workload. Among many robotic applications include real-time object recognition, where the combined power of computer vision and artificial intelligence gains the ability to identify objects.
The technology likewise utilizes machine learning and deep learning. Despite this advanced function, there is a challenge in researching these technologies as they require machines for code implementation and data gathering. The need for hardware and lower-level code in completing a machine likewise arises.
The mobile manipulator base LoCoBot, short for Low Cost Robot, uses ROS-based open-source packages. This research rover serves as a platform for mapping, navigation, and optional manipulation in research facilities, laboratories, and classrooms. The platform grants researchers focus on developing high-level codes.
Open-source software, partnered with navigation and full ROS-mapping packages, simplifies LoCoBot development—with the modular Python API that only requires 10 lines of code to move the platform and the manipulator. The pre-assembled robot allows ROS development within an hour from the acquisition as its software comes loaded with terminal commands and the hardware only demands minimal setup.
Design
The robot utilizes iRobot’s Create 3 and uses an Intel NUC NUC8i3BEH Core i3 processor, which has 8GB RAM and 240g HD. For mapping and scanning, an Intel RealSense Depth Camera D435 rests on top of the independently controlled pan or tilt mechanism (2XL430-W250-T). Users may opt to add 360-degree LIDAR to improve scanning and mapping, especially for more advanced projects.
Create® 3
The Create 3 is a mobile robotics platform designed for developers, educators, and students. Equipped sensors and actuators allow the development and testing of robotic algorithms. The software relies on ROS 2. ROS 2 publication produces all sensor data and ROS 2 servers and subscriptions control actuators while responding to user requests.
Some autonomous behavior also comes with the robot, like wall-following, docking, and reacting to obstacles. The ROS 2 action and parameter configures and/or triggers these functions. Create 3 is configurable through a web server accessible over a network.
Intel NUC Mini PC
The robot runs on an 8th Gen Intel Dual-Core i3 with 8GB DDR4 RAM and 240GB SSD. It uses Intel Iris Graphics 655 for display, while connectivity options are available through Wifi, Bluetooth 5.0, and Gigabit Ethernet. Other features include 4K support, dual monitor, HDMI, Card reader, USB, Thunderbolt 3, and Ubuntu 20.04.
Sensory - RealSense™ Depth Camera D435 & RPLIDAR A2M8 360° Scanner (Optional)
This camera belongs to the Intel RealSense D400 camera series. An additional option for LoCoBot is the indoor RPLIDAR A2, a 360-degree 2D LIDAR. Every RPLIDAR A2 takes up to 8000 laser-ranging samples per second, thanks to its high rotation speed. The installed system performs a 2D 360° scan within a 12-meter range, which extends to 18m with a few firmware adjustments. Users can use the generated 2D point cloud data for mapping, environment modeling, and localization.
Manipulator - WidowX 250 6DOF Robot Arm
The 6DOF WidowX 250 is a manipulator with a 650mm maximum reach and a 250g working payload. It is built using Robotis’ DYNAMIXEL X series servos, featuring high resolution with 4096 positions, temperature feedback, position feedback, and other user-definable PID parameters.
Pan & Tilt
The DYNAMIXEL 2XL controls two axes using a single module, serving as the LoCoBot camera’s pan and tilt. This servo can scan and detect objects regardless if the platform is moving or at rest. 2XL’s new features allow for a 360-degree control mode, highlighting a magnetic encoder and a hollow-back case assembly. The structure uses a metal gear (powder metallurgy) for high durability.
Aluminum Construction
The construction uses 20x20 extruded aluminum, along with 3-mm anodized aluminum plates. The channels in the T-slot aluminum bars connect with other bars or parts, creating additional mounting points for the LoCoBot. Standard T-slot nuts with 20x20 post-assembly can provide customization options for the platform.
MAXOAK K2 50,000mAh Power Bank
The MAXOAK K2 Power Bank powers laptop computers for long durations. The 50kAH power bank keeps NUC and its peripherals running for as long as 4 hours under moderate usage. Multiple outputs include, 20V 5A, 12V 2.5A barrel jacks, two 5V 1A USB-A ports, and two 5V 2.1USB-A ports.
Software
The Fully Configured Navigation Stack simultaneously localizes and maps out (SLAM) the environment (SLAM). It generates new maps along the process, localizes itself to a pre-generated map, and creates 3D point cloud views of the surroundings. It likewise forms local and global cost maps for avoiding obstacles and planning a path, in real time.
Rviz Visualization Environment sees sensor data, views maps, and monitors the robot's progress while navigating or perceiving. The process may be done on either the LoCoBot itself or on a remote computer through ROS networking.
The RealSense D435 camera, along with the robotic arm, provides LoCoBot with a fully configured perception pipeline. The robot's ability includes finding transforms to multiple small objects, picking up objects in order based on distance, and sorting objects by color. With such perception, researchers can dynamically tune different point cloud filter parameters with an intuitive GUI.
Using Moveit Support to manipulate the robot arm abstracts away motion planning, checks collision, and inverses kinematics. The fully integrated MoveIt package works with ROS control on either the physical or Gazebo-simulated robots. Rviz simulation is also possible with MoveIt’s Fake Controller Manager plugin.
References
Recommended Specs



Continue Reading

Clone Robotics’ humanoid hand uses hydraulics to mimic complex human hand function.


Learn how Shadow Robot combines deep dexterous robotics expertise with transparent collaboration to move from concept to scalable manipulation systems.

A robotic hand developed at EPFL surpasses the limits of human dexterity with a dual-thumbed, reversible-palm design that can detach from its robotic 'arm' to reach and grasp multiple objects.

3 minutes read
