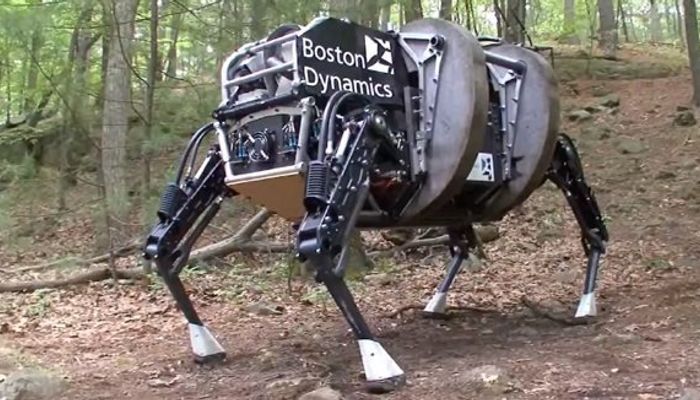
Big Dog
A quadruped robot that walks and carries heavy loads. The robot works as a pack mule to assist soldiers in carrying their gear. BigDog is developed to function as a mechanical mule. The powered autonomous quadruped is capable of carrying significant payloads, operating outdoors, with static and dynamic mobility, and has fully integrated sensing and navigation. Sensors for locomotion include joint position, joint force, ground contact, ground load, a gyroscope, LIDAR, and a stereo vision system. Other sensors focus on the internal state of BigDog, monitoring the hydraulic pressure, oil temperature, engine functions, battery charge, and others. BigDog runs at 10 kmh, climbs slopes up to 35 degrees, walks across rubble, climbs muddy hiking trails, walks in snow and water, and carries up to 150kg loads.












Technical Specifications
| Height | 125 |
| Length | 100 |
| Width | 30 |
| Weight | 113.4 |
| Speed | 11.26 |
| Computing | |
| Actuators | 16 |
| Power |
Overview
BigDog is developed to function as a mechanical mule. The powered autonomous quadruped is capable of carrying significant payloads, operating outdoors, with static and dynamic mobility, and has fully integrated sensing and navigation.
Sensors for locomotion include joint position, joint force, ground contact, ground load, a gyroscope, LIDAR, and a stereo vision system. Other sensors focus on the internal state of BigDog, monitoring the hydraulic pressure, oil temperature, engine functions, battery charge, and others.
BigDog runs at 10 kmh, climbs slopes up to 35 degrees, walks across rubble, climbs muddy hiking trails, walks in snow and water, and carries up to 150kg loads.
References
Background information about the Big Dog project, including technical specifications about the robot, as well as more background on the motivations by the creators to develop this quadruped robot.
Recommended Specs



Continue Reading

DEEP Robotics is a leader in the innovation and application of embodied intelligence technology, being the first in the world to achieve collaborative search and rescue with robot dog clusters.



The joint operation of the climate-friendly NECOC process for the production of carbon from the CO2 in the ambient air starts at KIT

3 minutes read

The prototype machine that Carbyon and Demcon have built together is essentially nothing more than a large-scale vacuum cleaner, wheels including. Eventually, there will be entire fields of these machines worldwide, running on green energy and continuously extracting CO2 from the air.

6 minutes read
