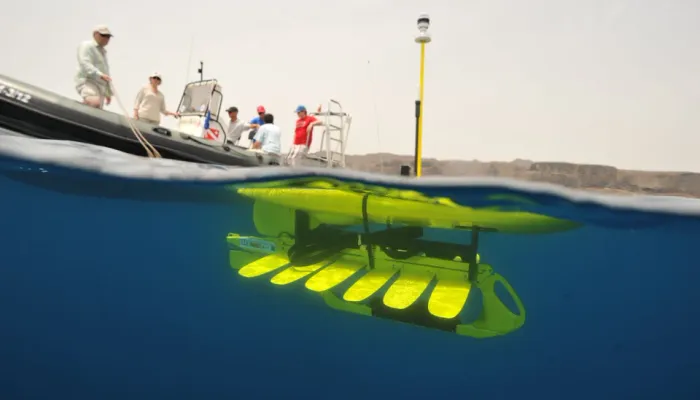
Wave Glider
Powered by waves and solar energy, the Wave Glider is an unmanned surface vehicle that allows organizations to build a network of sensors to better understand all aspects of ocean activity. The Wave Glider uses energy harvesting and propulsion to enable a mobile sensor-hosting platform that can operate over long durations in the open ocean. The combination of wave-propulsion and stored solar energy enables persistence, continuous data collection, and real-time communications.




















Technical Specifications
| Length | 305 |
| Width | 81 |
| Depth | 23 |
| Weight | 150 |
| Umbilical | 8 |
| Water Speed: | 1 – 3 |
| Battery Storage | 0.9 – 6.8 |
| Avg. Continuous Power | 5 – 20 |
| Max Solar Collection | 180 |
| Towing capacity | 500 |
| Communication | |
| Endurance | up to 1 |
Overview
The Wave Glider uses energy harvesting and propulsion to enable a mobile sensor-hosting platform that can operate over long durations in the open ocean. The combination of wave-propulsion and stored solar energy enables persistence, continuous data collection, and real-time communications.
The Wave Glider converts wave motion into propulsion using a two-part architecture that leverages the difference in motion at the ocean surface and below. A solar energy system powers sensors, communications, and enables a thruster propulsion system that provides additional navigational agility and thrust for challenging ocean conditions.
Wave Gliders can operate individually or in fleets to create a network effect for data collection and monitoring. Autonomous navigation and real-time communications are key capabilities that allow low cost, dependable operations.
The Wave Glider offers flexibility for sensor and payload integration. A payload design makes it easy to reconfigure or adjust payloads. A motion and sound isolation system makes the Wave Glider well suited for towed acoustic sensor applications.
Wave Glider software is built upon open standards to facilitate rapid solution design and integration with 3rd party systems. Key components include:
Regulus Operating System
The vehicle operating system, based upon Linux and Java, for on-board command and control of all Wave Glider functions including sensors.
- In-situ data processing enhances payload effectiveness with capabilities like pre-processing and data compression for real-time downloads
- Autonomous navigation and vessel avoidance (based on AIS)
- At-sea mission reconfiguration
Wave Glider Management System (WGMS)
A web-based console for mission management, enables both piloting and data management. Both browser and programmatic interfaces allow users or applications to perform the following:
- Access piloting tools and program navigation
- Issue commands to vehicles and payloads
- Extract mission and sensor data for reporting or integration into 3rd party applications
References
Describes the technology, it's advantages, and applications.
Describes in detail it's specifications, eg; safety, payloads, power, navigation, operation, and more.
Extensive overview of the sensors in the WaveGlider.
Recommended Specs



Continue Reading

Examining the latest developments in self-driving vehicles.


Lockheed Martin and General Motors are developing the next generation of lunar rovers for NASA's Artemis mission.


Autonomous Vehicles (AVs) are poised to revolutionize human transportation by making it more safe, comfortable, and reliable. From passenger travel to cargo transportation, AVs equipped with AI and sensors offer tremendous potential.
