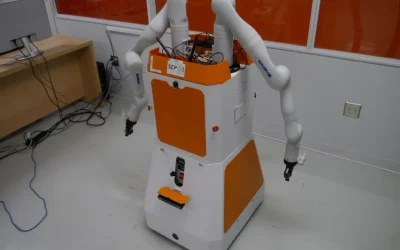
PR2
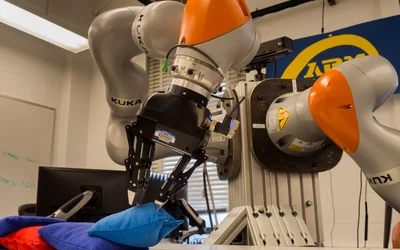
An advanced research robot capable of navigating through environments. The PR2 robot is a robotics research and development platform. PR2 combines the mobility to navigate human environments and the dexterity to grasp and manipulate objects in those environments. The PR2 is an open platform and can be adapted to meet researchers specific needs. PR2's arms are backdriveable and current controlled so PR2 can manipulate in unstructured environments. It's arms have a passive spring counterbalance system so the arms float even when the power is off. The robot's wrist has two continuous degrees of freedom and lots of torque so PR2 can manipulate everyday objects from doors to frying pans. PR2's gripper can grasp everything from towels to tea cups, and brooms to brew
Technical Specifications
| Height | 164 |
| Length | 66.8 |
| Width | 66.8 |
| Weight | 226.8 |
| Speed | 3.6 |
| Degrees of freedom (DOF) | 20 |
| Sensors | |
| Actuators | 32 |
| Power | 1.3 |
| Computing | 2 |
| Software | |
| Materials | |
| Cost | 400.000 |
Overview
The PR2 robot is a robotics research and development platform. PR2 combines the mobility to navigate human environments and the dexterity to grasp and manipulate objects in those environments. The PR2 is an open platform and can be adapted to meet researchers specific needs.
PR2's arms are backdriveable and current controlled so PR2 can manipulate in unstructured environments. It's arms have a passive spring counterbalance system so the arms float even when the power is off. The robot's wrist has two continuous degrees of freedom and lots of torque so PR2 can manipulate everyday objects from doors to frying pans. PR2's gripper can grasp everything from towels to tea cups, and brooms to brews.
The PR2 hardware platform and 1000+ software libraries enables researchers to focus on new capabilities. The common platform also lets researchers easily share their research results in a way that is reproducible.
References
Describes the mechanisms, joints, and drivetrain. Goes into the mechanical specifications, sensor overview, and power system. Describes the computer overview, networking aspect, and base station setup.
Project on the website of the manufacturer which has more visuals, video's and animations.
Describes an implemented system comprising autonomous navigation, door-opening, and plugging- in. Validates the robustness and effectiveness of this system through extensive experimentation, including a “challenge”.
Recommended Specs



Continue Reading
It’s one thing for a robot to sort through a pile of rigid objects like blocks, but what about softer stuff?

2 minutes read

Rosie is a dual arm mobile manipulation robot designed for pick and place in an industry 4.0 setting.

8 minutes read


InDro Launches New Online Store
4 minutes read
