MIT Emergency Ventilator
During the Covid-19 pandemic the lack of ventilators is one of the major challenges hospitals face. Ventilators keep patients breathing when they can't so on their own anymore. They cost around $30,000. A team of engineers, physicians, and scientists at MIT is developing a safe, inexpensive alternative that can be built around the world.
Technical Specifications
| Respiratory Rate (RR) | 8 – 40 |
| Tidal Volume (TV) (air volume pushed into lung) | 200 – 800 |
| I/E Ratio (inspiratory/expiration time ratio) | adjustable range of 1:1 – 1:4* |
| Assist Detection pressure | |
| Microcontroller | Arduino |
| Motor | Model |
| Torque | |
| Gear Ratio | |
| Operating Speed | |
| Battery (prototype) | Voltage |
| Current | |
| Capacity |
Overview
The E-vent is a way of automating a manual resuscitator, as a potential means for longer-term ventilation. This is a completely off-label use, but the global interest when a hospital has used up all ventilators, and the only option is manual bagging a patient. This may allow less severe patients to be cared for by less specialized clinicians, while resources are focused on those most in need. However, at no time should a patient be unattended without someone skilled available to directly monitor their vital signs.
Air Delivery Technique
Two main strategies were identified for the ventilator’s air delivery system. One strategy uses a constant pressure source to intermittently deliver air while the other delivers breaths by compressing an air reservoir. The latter approach was adopted as it eliminates the need for the continuous operation of a positive pressure source. This reduces power requirements and the need for expensive and difficult to repair pneumatic components. Where most emergency and portable ventilators are designed with all custom mechanical components, we chose to take an orthogonal approach by building on the inexpensive BVM, an existing technology which is the simplest embodiment of a volume-displacement ventilator. Due to the simplicity of their design and their production in large volumes, BVMs are very inexpensive (approximately $10) and are frequently used in hospitals and ambulances. They are also readily available in developing countries. Equipped with an air reservoir and a complete valve system, they inherently provide the basic needs required for a ventilator.
Because almost every bed in a hospital has a manual resuscitator nearby, available in the event of a rapid response where healthcare workers maintain oxygenation by squeezing the bag. Automating this appears to be the simplest strategy that satisfies the need for low-cost mechanical ventilation, with the ability to be rapidly manufactured in large quantities. However, doing this safely is not trivial.

Compression Mechanism Design
The most obvious means to actuate a BVM is to mimic the hand motion for which the bag was designed. This requires the use of linear actuation mechanisms (e.g. lead screw or rack and pinion) which despite being simple to implement, require linear bearings and extra space. Other compression techniques were sought to take advantage of the cylindrical BVM shape. However, since BVMs were designed for manual operation, their compressible outer surface is made from high-friction material to maintain hand-contact with minimal slippage. This eliminates the option of tightening a strap wrapped around the bag as a means of actuation. To avoid the problems associated with high surface friction, the two main candidates for actuation were a roller chain and cam compression. These options employ rolling contact with the bag rather than sliding contact, eliminating losses due to kinetic friction between the actuator and the bag.
Roller-chain Concept
The roller-chain concept utilizes roller-chains with roller diameters larger than link width. A sprocket connects to the motor shaft; its clockwise/anticlockwise rotation compressing and expanding the bag for breath delivery. Preliminary experiments revealed that radial compression of a BVM requires a significantly higher force than the vertical compression for which the bag was designed. Additionally, its operation was noisy, and the bag crumpled under radial compression, inhibiting the desired pure rolling motion, and preventing an accurate and repeatable tidal volume from being delivered.

CAM Concept
The cam concept utilizes a crescent-shaped cam to compress the BVM, which allows smooth, repeatable deformation to ensure constant air delivery. As it rotates, the cam makes a rolling contact along the surface of the bag and unlike the roller-chain, achieving low-noise of operation. By controlling the angle of the cam’s shaft, the amount of air volume delivered can be accurately controlled. The cam mechanism was found to be more space-efficient and have a lower power requirement than the roller chain concept, and was therefore the method of choice.

Control design
This ventilator provides assured tidal volumes using an assist-control (AC) mode. The operator selects the tidal volume appropriate to the patient, usually 6-8 mL/kg of ideal body weight and a minimum respiratory rate. This provides a minimum assured minute ventilation (Ve). If the patient is breathing above the set
Controller
An off-the-shelf Arduino Duemilanove microcontroller board was selected to control our device. The microcontroller runs a simple control loop to achieve user-prescribed performance. The control loop is triggered by the internal timer set by user inputs, with the inspiratory stroke initiated at the beginning of the loop. Once the prescribed tidal volume is reached, the actuator returns the cam back to its initial position and holds until the next breath.
Motor
According to initial experiments, a maximum torque of 1.5 Nm was required for maximum volume delivery. A PK51 DC Gearmotor with a stall torque of 2.8 Nm was selected for the prototype. Despite the lower torque value measured in our experiment, we found that this motor did not provide quite enough torque to effectively drive the cam at the slower inhalation cycle rates prescribed to some patients. While a larger motor will be necessary to achieve better speed control, this motor functioned acceptably. It was desirable for its gear reduction ratio of 51:1, and operating speed in the required range of 50-70 rpm.
Motor Driver
The motor driver comprises of two H-Bridge circuits. These circuits direct current through the motor in opposite directions, depending on which set of switches on the circuits are energized. The speed of the motor is signaled with a pwm pin. The power is supplied directly from the battery, so the only limit is the current capability of the chip and battery. We opted to use the Solarbotics® motor driver, which is capable of supplying 5 amps of current to the two circuits. The PK51 motor's stall current is rated at 5.2 amps which means the motor driver will be able to handle the requirements for the system. 4.6.
User Interface
The three user inputs (tidal volume, bpm, and I:E ratio) are set via three potentiometer knobs. Future iterations of the device will include the addition of an LCD display to show the input settings as well as airway pressure level and battery power status. 4.7.
Safety Features
To ensure that the patient is not injured, the airway pressure is monitored with a pressure sensor connected to a sensor output on the BVM. The same pressure sensor used for initiation of assist control also triggers an alarm if the pressure rises too high, alerting the physician to attend to the patient. As a further safety measure to prevent over-inflation, future iterations of the device will include a mechanical pressure relief valve. 4.8.
Power Delivery
An AC/DC converter can be used to power the ventilator directly from a wall outlet or a vehicle inverter. When external power is unavailable, the ventilator can run off of any battery capable of delivering 12-15 volt at least 3.5 Amps. For the prototype, we used a 14.8 volt, four-cell LiIon battery pack capable of 4.2 Amps (limited by protective circuitry), with a capacity of 2200 mA-hr.
The use of a bag-valve-mask (BVM) in emergency situations is not a new concept. In the reference section below you can find links to earlier projects. All updates to this project and all critical background information are posted on the MIT E-Vent website.
References
This is the homepage of the project and the starting place to find all critical information and updates, as well as the place to get in touch with the MIT E-Vent team.
This paper describes the design and prototyping of a low-cost portable mechanical ventilator for use in mass casualty cases and resource-poor environments. The ventilator delivers breaths by compressing a conventional bag-valve mask (BVM) with a pivoting cam arm
Student team from Rice University developed a rack and pinion compression mechanism in order to automate the bag valve mask.
Recommended Specs



Continue Reading

With vaccination numbers increasing and the pandemic starting to decline, wireless contact tracing looks to adapt to new applications.

4 minutes read


Advanced digital diagnostics combined with IoT connectivity comes in handy when fighting a global pandemic's severe impacts.
3 minutes read

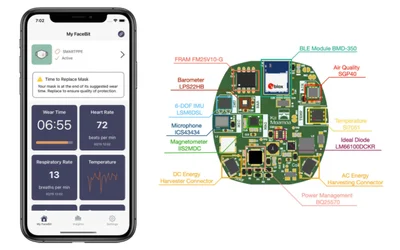
FaceBit aims to be low-cost, energy-efficient, and easy-to-integrate hardware with rich sensing functionalities– monitors physiological signals
