KUKA LBR iiwa
A lightweight robot for delicate assembly work, safety fences make way for Human Robot Colaboration











Technical Specifications
| Payload | |
| - LBR iiwa 7 R800 | 7 |
| - LBR iiwa 7 R800 CR | 7 |
| - LBR iiwa 14 R820 | 14 |
| Maximum reach | 800 |
| - LBR iiwa 7 R800 | 800 |
| - LBR iiwa 7 R800 CR | 820 |
| - LBR iiwa 14 R820 | |
| Mounting positions | |
| - LBR iiwa 7 R800 | |
| - LBR iiwa 7 R800 CR | |
| - LBR iiwa 14 R820 | |
| Protection class |
Overview
Quick reactions
Thanks to its joint torque sensors, the LBR iiwa can detect contact immediately and reduces its level of force and speed instantly. Its position and compliance control enables it to handle delicate components without creating crushing and shearing hazards.
Able to learn
The user can choose from three operating modes and program the LBR iiwa via simulation: indicate the desired position and it will remember the coordinates of the path point. Stop for breaks and control it with simple touch commands.
Sensitive
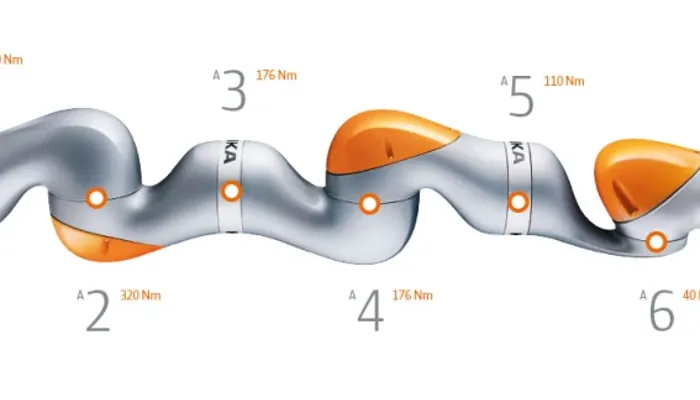
The LBR iiwa with its high-performance servo control is able to detect contours quickly under force control. It establishes the correct installation position and mounts components quickly and with the utmost precision with an axis-specific torque accuracy of ±2% of the maximum torque. The LBR iiwa can also find small, delicate components in next to no time without your assistance.
Independent
The LBR iiwa's controller, KUKA Sunrise Cabinet, simplifies the quick start-up of even complex applications. It gives the operator a third hand and has the LBR iiwa take care of unergonomic, monotonous tasks reliably and independently.
Media flange options
The energy supply system for the external components is hidden in the kinematic structure of the LBR iiwa. Pneumatic and electrical energy supply systems are available. All media flanges have a hole pattern conforming to DIN ISO 9409-1-50-7-M6.

References
Contains elaborate description of the robotic arm, images, and video's. Also describes the multiple applications.
Elaborate brochure describing the technology, technicalities, and specifications.
Recommended Specs



Continue Reading
In human-robot collaboration, human and machine work hand in hand. The human operator controls and monitors production, the robots perform the physically strenuous work. Both contribute their specific capabilities.


After the introduction of radiotherapy, the use of metallic knives in the field of tumor treatment decreased. Now the knife has been experiencing a revival for several years. Yet, the knife in question is not a physical instrument, but a virtual one.


Could this be the time we say goodbye to robotic awkwardness and hello to seamless motion? This article highlights the groundbreaking concept of whole-body control, a coordinated robotic motion technique that resembles natural movement. Imagine a robot smoothly navigating its environment, performing tasks with grace and precision. This innovative approach allows for improved efficiency and greater versatility in real-world settings.
