Crabster Robot
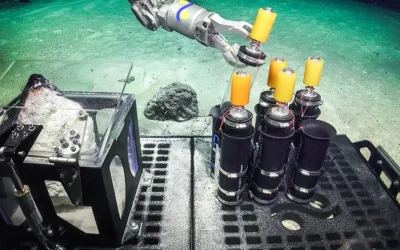
An alternative to propeller-driven remotely-operated vehicles (ROVs) and autonomous underwater vehicles (AUVs). Unlike ROVs and AUVs, the Crabster is designed to be lowered by crane to around 200 meters (650 feet) below the surface, where it will walk along the sea floor on six legs powered by 30 joints. Moving on legs will hopefully prove more stable, and won't stir up as much debris as propellers. And like a crab or a lobster, the robot's two front legs are equipped with manipulators that can grasp objects that can be stored in a frontal compartment.








Technical Specifications
| Length | 2.42 |
| Width | 2.45 |
| Height | 2 |
| Weight | 600 |
| Maximum depth | 200 |
| Power | 20 |
| Walking speed | 0.5 |
Overview
Unlike ROVs and AUVs, the Crabster is designed to be lowered by crane to around 200 meters (650 feet) below the surface, where it will walk along the sea floor on six legs powered by 30 joints. Moving on legs will hopefully prove more stable, and won't stir up as much debris as propellers. And like a crab or a lobster, the robot's two front legs are equipped with manipulators that can grasp objects that can be stored in a frontal compartment.
The robot's shell deflects strong currents by adjusting its overall posture. It takes four people to operate the Crabster. The pilot controls the robot's walking and posture while a co-pilot works its manipulators, cameras, and lights. A navigator plans its movement and keeps track of its position, while a sonar engineer monitors the scanning sonar and other sensors. This is all accomplished from the remote control station inside one of the shipping containers.
The body frame of CR200 is made of carbon fiber reinforced plastic (CFRP). Since CFRP has a higher specific stiffness, strength, and material damping than conventional materials, the structure absorbs more noise and vibration and improves settling time and fatigue.
All the electrical systems, including interface boards, power boards, and communication devices are contained in two pressure canisters, which are made of aluminum.
The body and legs/arms have fairing skins to enhance the hydrodynamic characteristics. The skins and brackets are also made of GFRP .The front two legs of CR200 have seven joints and the other four legs have four joints. The front legs use four joints in hexapod walking and seven joints in manipulation. Since three joints for each leg are usually sufficient for the hexapod gait, the robot posture is optimized for the current or an uneven seafloor with one redundant joint. The length ratio of upper leg to lower leg was determined as 3:4 from biological data of creatures such as lobsters, crabs, and insects.
References
Article describing the background of the project, the concept, mechanical design, and equipment configurations. Describes the remote control systems, turbid water system, and the field test.
Recommended Specs



Continue Reading

A Quick Start Guide to Underwater ROVs. In this guide, you’ll learn about what defines a remotely operated vehicle, different types of ROVs, and what they are used for. Underwater ROVs are used to observe and interact underwater across a range of industries.

9 minutes read

An ROV camera is any visual imaging system that can be used on underwater ROVs to provide the operator with a perception of the operating environment. The depth rating for an ROV camera usually starts at 300m.
3 minutes read

The aim of this article is to provide a high-level answer to the question: “What do people use underwater robotic arms for?” If you’ve worked with Remotely Operated Vehicles (ROVs) before, this article probably isn’t for you. For everyone else, let’s go.
6 minutes read