Cave Exploration Robot
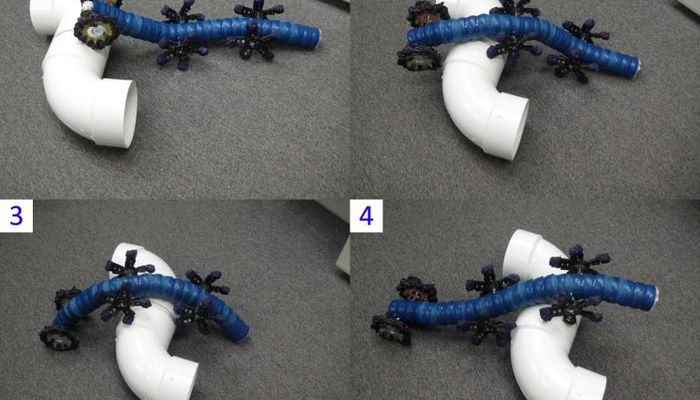
A highly maneuverable, segmented robot powered by leg-wheels intended for the exploration of subterranean spaces. This robot has a flexible "neck" that allows it to bend around obstructions and a locomotion method consisting of wheels with "tentacles" covered in latex that help the robot grip and climb over obstacles efficiently. This flexibility allows the robot to conform to highly uneven and












Technical Specifications
| Microcontroller | |
| Autonomous operation time | 45 |
| Motors | 6 |
| Wheels | 6 |
Overview
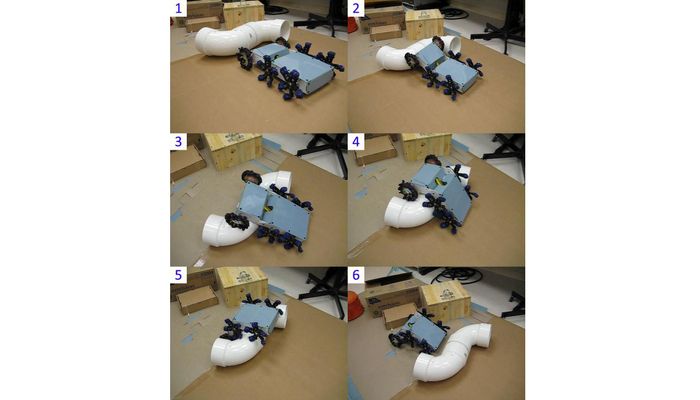
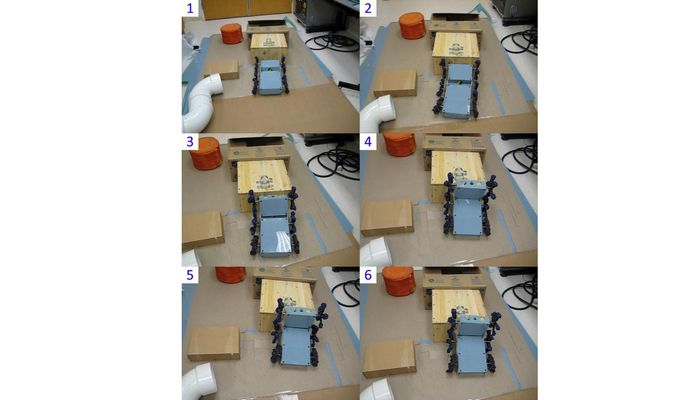
For a cave exploration robot, moving through narrow winding paths and over obstacles is an unavoidable requirement. This robot has a flexible "neck" that allows it to bend around obstructions and a locomotion method consisting of wheels with "tentacles" covered in latex that help the robot grip and climb over obstacles efficiently. This flexibility allows the robot to conform to highly uneven and challenging terrain.
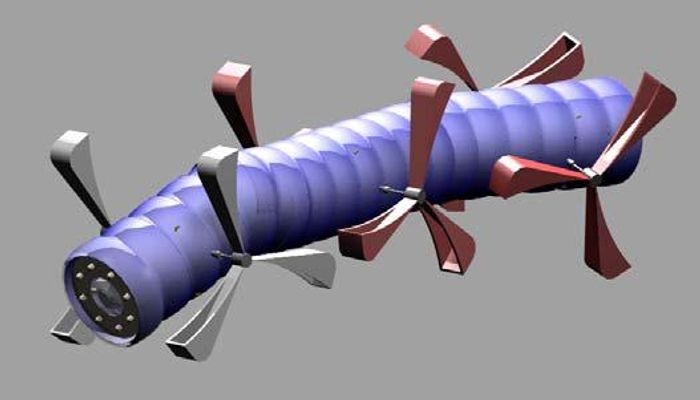
The chassis is designed in such a way that makes it easy to access all the parts placed inside of the robot. The modular chassis is composed of lateral parts where the motors are attached; a base floor where all the electronics are fixed; and some bars on top providing the body with sufficient rigidity. The chassis is covered with a plastic case, sealing the contents of the robot to prevent water incursion. In order to facilitate exploration activities, a wireless camera and a light source were incorporated into the vehicle. These devices, as well as the robot’s movement were controlled through a main board with wireless serial communications and a PC with Lab‐View. The main control panel in LabView allows control of the direction of the robot and showed the images acquired by the camera in real time.
Six DC gear motors were distributed throughout the body, three on each side. Each motor, selected to provide a torque sufficient to lift the weight of the whole body by it‐self, was attached to a wheel.
References
Describes the background of the project, and previous works, experiments, the conclusions, and future work.
Recommended Specs



Continue Reading

The joint operation of the climate-friendly NECOC process for the production of carbon from the CO2 in the ambient air starts at KIT

3 minutes read

The prototype machine that Carbyon and Demcon have built together is essentially nothing more than a large-scale vacuum cleaner, wheels including. Eventually, there will be entire fields of these machines worldwide, running on green energy and continuously extracting CO2 from the air.

6 minutes read


The world is full of life-threatening jobs. There was a time when humans merely gritted their teeth, accepted the risk and trusted that the training they received would protect them from harm. However, there is a growing trend of using robots to do the tasks that could harm humans.

5 minutes read
