Soft-robotic sampling robot could help keep front-line staff free from infection
Designed to address the risk to front-line staff from COVID-19, this autonomous swab-sampling robot is designed to take the human element out of sample gathering.

17 Feb, 2022. 3 minutes read

Designed with safety systems to protect the user, this soft-robotic sampler could replace human staff at testing centers.
The next time you need to provide a sample swab, for COVID-19 diagnosis or any other reason, you might not be doing so face-to-face with a staff member but with an autonomous robot, designed with a soft-robotics force-sensing sample probe which will keep you comfortable even as it protects front-line staff from potential exposure to infectious agents.
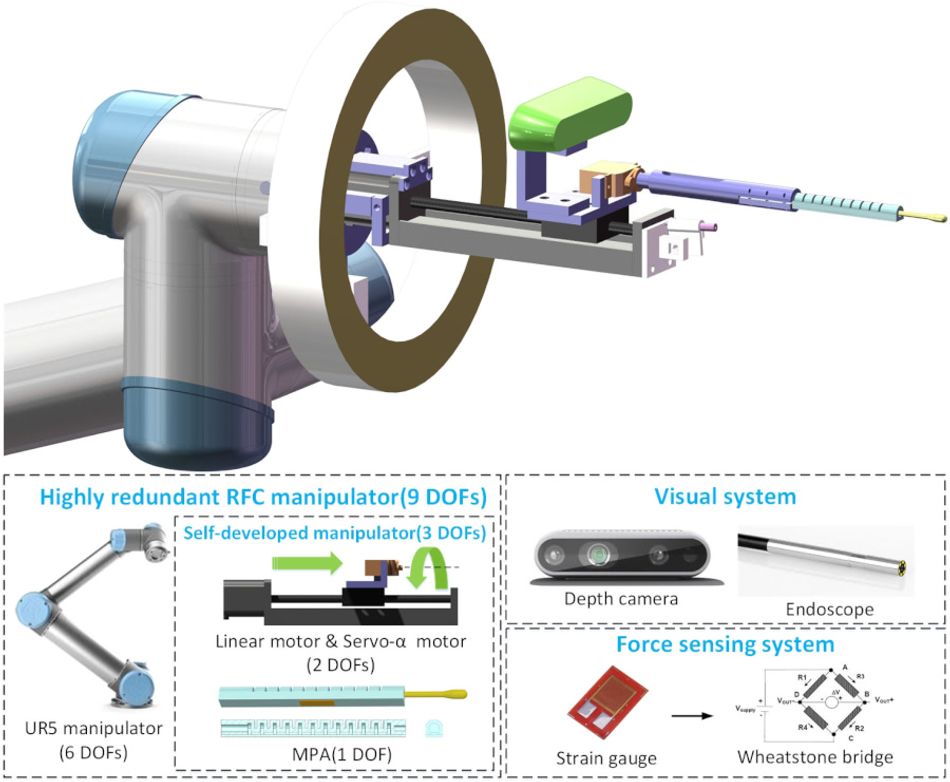
Combining a nine-degrees-of-freedom (9DoF) rigid-flexible coupling (RFC) robot with a depth-sensing visual system linked to a machine learning system which can guide the swab directly to where it’s required without human intervention — and without causing discomfort to the patient.
Risk reduction
Robotics are already used for COVID-19 testing purposes: Cornell University’s COVID-19 Testing Laboratory (CCTL) was put together in less than two months for rapid testing of students, staff, and faculty, and uses a robot for automated transfer of sample liquid into pools for processing. Artificial intelligence, too, has been put to work during the pandemic for tasks ranging from predicting patient outcomes to accurately mapping its spread and even diagnosing infections from lung imagery and breath sounds.
The platform developed by first author Yingbai Hu and colleagues, however, is directly designed to reduce first-line medical staff exposure to potentially infected individuals — entirely replacing the manual face-to-face sample swabbing process without the drop in sample quality associated with allowing untrained individuals to self-swab.
“Robot-assisted OP-swab [oropharyngeal-swab] sampling is a promising technique,” the researchers explain, “because it relieves the burden from medical staff, is convenient for large-scale deployment, is cost-effective, and offers sampling standardization.”
The biggest issue with swapping trained staff out for autonomous robots, and the primary reason previous efforts have focused on teleoperation, is the potential for damage: The human throat is made up of soft tissue and can be easily damaged, as anyone who has sung along too loud at a concert and regretted it the next morning will attest. A rigid robotic probe, then, is ill-suited to the task and could potentially do more harm than good.
The team’s answer: A novel micro-pneumatic actuator (MPA) with an integrated force sensor, designed to be lighter, smaller, softer, and safer than rival rigid designs. The robot’s second-to-last link, meanwhile, is designed to remain solely within the oral cavity center constraint, meaning no unexpected collisions with the patient’s oral cavity should be able to occur.
Soft sample-taking
The robot itself is built from a Universal Robots UR5 robotic manipulator arm, to which the soft-robotic manipulator is attached — itself made up from a linear motor prismatic joint, a servo motor revolute joint, and the novel MPA which can inflate and deflate 11 individual air chambers to bend on-demand.
To ensure sterility between patients, the MPA is built to be disposable: Once a sample is taken and the patient has left, a staff member is able to quickly disconnect the MPA and dispose of it with medical waste; a custom quick-connect system is claimed to speed the swap-out task.
The vision system, designed so that teleoperators are not required and the sample-taking robot can operate entirely independently, uses imagery from an Intel RealSense depth-sensing camera and a two-dimensional endoscope which feed into a machine learning system trained using the Mask R-CNN convolutional neural network. These data are fed into an online motion planning system based on a varying-parameter zeroing neural network (VP-ZNN) to provide the robot with planned trajectories, with feedback from the integrated force sensors provided during sampling.
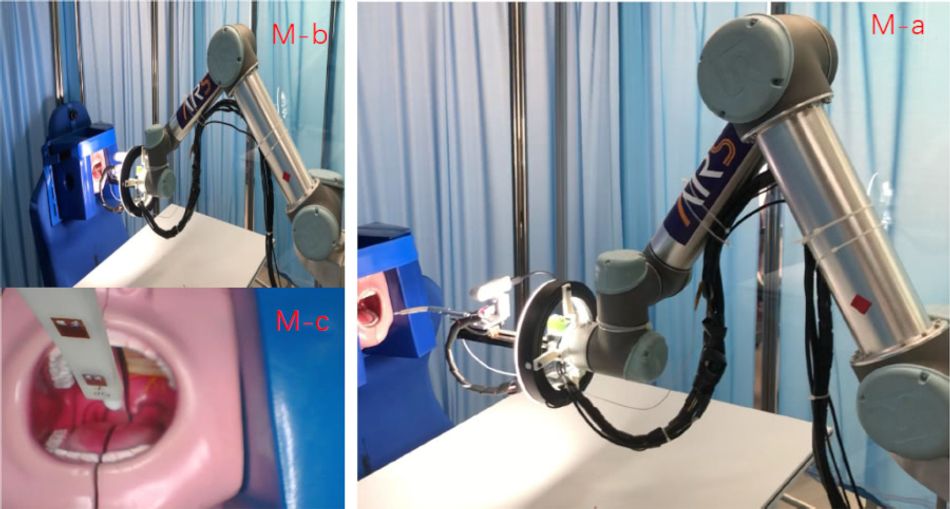
In testing, the vision system demonstrated a 95 per cent recognition success rate and a sampling time of under 20 seconds — further proven during trials on both mouth models known as “oral cavity phantoms” and 29 human volunteers.
The team has indicated that its future work will focus on improving the robustness of the system, and move forward with larger-scale clinical testing — though, at the time of writing, no timescale for the latter was provided.
The researchers’ work has been published under open-access terms in the journal IEEE Robotics and Automation Letters.
Reference
Yingbai Hu Jian Li, Yongquan Chen Qiwen Wang, Chuliang Chi, Heng Zhang Qing Gao Yuanmin Lan, Zheng Li Zonggao Mu Zhenglong Sun, and Alois Knoll: Design and Control of a Highly Redundant Rigid-flexible Coupling Robot to Assist the COVID-19 Oropharyngeal-Swab Sampling, IEEE Robotics and Automation Letters, vol. 7, no. 2. DOI 10.1109/LRA.2021.3062336.