Advancing Manufacturing Robotics: From Automation to Autonomy and Collaborative Intelligence
In recent years, the use of devices and systems that utilize data to function in an intelligent manner has become commonplace. Machines that make high-level decisions comparable to humans and those that surpass humans in performing work depending on how they are applied have also appeared.
01 Mar, 2023. 6 minutes read

Oven ranges that cook according to the amount of ingredients and their condition, algorithmic trading that determines the appropriate time for the buying and selling of stocks according to movements of the market, etc... In recent years, the use of devices and systems that utilize data to function in an intelligent manner has become commonplace. Machines that make high-level decisions comparable to humans and those that surpass humans in performing work depending on how they are applied have also appeared.
Intelligent robots that use sensors and AI to flexibly accomplish work
Electronic appliances and information systems in the past simply carried out tasks according to procedures and conditions determined in advance without any fuss. While the fact that they did not perform any unexpected movements even when the usage environment changed was an advantage, they were unable to handle changes in a clever and resourceful way. Naturally, even these past machines had the advantage of rapidly and accurately performing work in an automated manner and can be described as being sufficiently useful machines.
By contrast, recent smart machines and systems have become able to autonomously produce resourceful responses and are expanding their scope of application to include work domains that previously relied on manpower. The field in which the effects of such smart machinery and systems have been particularly noticeable is the manufacturing industry. They detect individual differences between work in production and variations in work quality, etc. to autonomously adjust the production conditions. It has become possible to realize a smart factory that maintains productivity and quality at a high level.
This shift toward smart machinery is advancing particularly in industrial robots. Until now, industrial robots were used primarily to automate monotonous, repetitive work and work that was dangerous and difficult for humans to perform. However, due to a lack of work flexibility similar to many machines in the past, the situations in which they could be applied were limited. Now it has become possible to apply such machines to diverse forms of work that previously required a flexible response and had to rely on manpower.
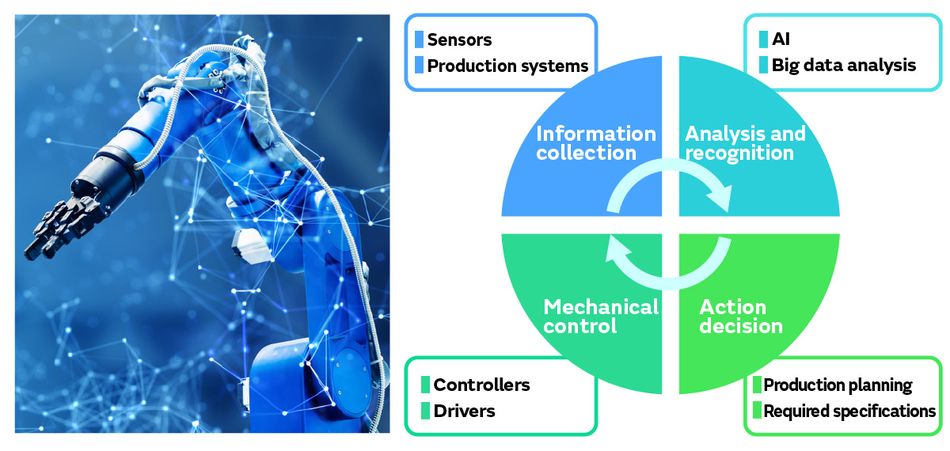
The four tasks of "information collection," "analysis and recognition," "action decision," and "mechanical control" are continuously carried out inside smart robots, which have dramatically advanced in recent years.
Among these tasks, information collection involves the collection of data about the surrounding environment as well as information, etc. about the production system through cameras and sensors, etc. Next, the task of analysis and recognition uses artificial intelligence (AI) and other advanced information processing technologies to assess the situation from the collected data. In other words, smart robots can be described as advanced IoT systems. Moreover, the action decision task determines the conditions under which the robot should be moved to achieve the objective. If the action decision is properly carried out based on the collected information, then in subsequent stages there are no significant differences with the conventional FA technologies that controlled industrial robots. Next, the mechanical control task appropriately controls the motors that move the robot arm, hand, and other moving parts.
Autonomous control of robots through linking with the production management system in a semiconductor plant
What kinds of work do current smart robots perform in cutting-edge plants and what effects do they have? We will use semiconductor and automobile plants as examples to explain the work tasks that are required in cutting-edge plants at both ends of the spectrum.
First is the semiconductor plant. In a semiconductor plant, silicon wafers are processed and treated in various ways to create chips with delicate and complex circuit patterns drawn onto them. A unique aspect of a semiconductor plant is the extreme degree to which automation and labor saving are promoted in the processes and work on the manufacturing line. This is because the introduction of people into the plant would become a factor in lowering the chip yield.
In recent years, the horizontal division of design and manufacturing labor has progressed in the semiconductor industry, and manufacturing has become fulfilled by companies called "foundries," which produce a wide range of chips under contract. Foundries carry out variable quantity production whereby the types of chips that they manufacture change according to market needs and the production plans of the manufacturers that specialize in design. Furthermore, because there is a possibility that the processing, treatment steps, and conditions may change for each manufactured chip, setup changes and changes in the destinations between the equipment, etc. frequently occur in the plant. The introduction of mechanisms that are able to flexibly adapt with only machinery and systems and using as little manpower as possible according to changes in the production items has become essential.
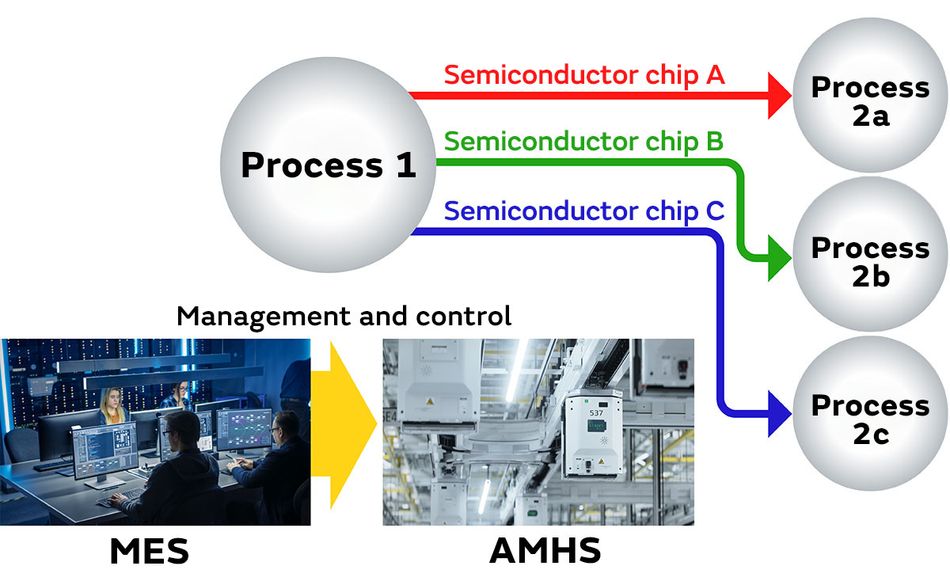
Smart robots can meet such demands. Transport robots called AMHS*1 are used in transport between processes in a semiconductor plant (Figure 2). To maximize productivity in a semiconductor plant, a mechanism that can transport materials in a timely manner according to the production schedule and the progress status of treatment in each process is essential. Therefore, the movements of the AMHS used for transporting between processes are linked to the MES*2 that manages the treatment and conditions in each process and the transport, etc. for autonomous control so that materials are transported at the optimal time.
*1 AMHS stands for "Automated Material Handling Systems." They are one type of automated guided vehicle (AGV). Typically, they lift up a box called a "FOUP" that contains the wafers for one lot and transport it to the destination along rails installed on the ceiling of the plant.
*2 MES stands for "Manufacturing Execution System." This is an information system that visualizes the status and movement of the equipment and items subject to processing/treatment on a manufacturing line to provide support to workers and aid in decision-making. In a semiconductor plant, there are many scenarios in which information systems autonomously adjust and control the operating conditions of robots and equipment without human judgment.
Coordination between humans and robots in the assembly and inspection processes of an automobile plant
Next, we have an automobile plant. Current automobiles are said to be composed of about 30,000 parts per vehicle. In a finished automobile plant, a wide variety of parts and materials are assembled in a complex and accurate manner to produce an automobile across the five processes consisting of "pressing," "welding," "painting," "assembly," and "inspection." Moreover, various types of robots are used in each process.
Among the five processes, the shift to labor saving similar to semiconductor plants has progressed in the three processes of pressing, welding, and painting. This is because the materials used in the work are so heavy that they cannot be supported by a person, and people may be exposed to toxic gases or chemicals. Therefore, large and fast-moving multi-axis robots are used. The robots used here are required to perform work quickly and accurately rather than with intelligence.
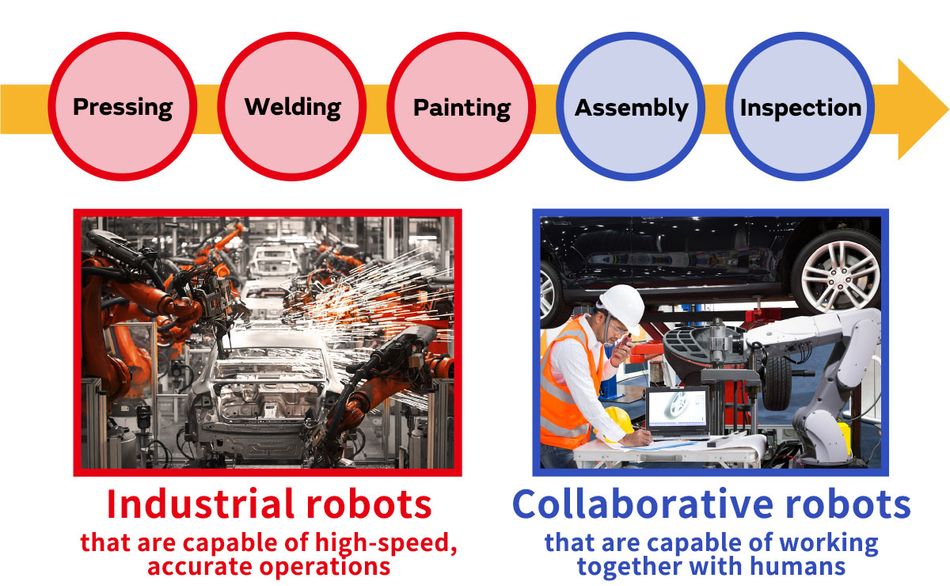
At the same time, work that must rely on manpower still remains in the assembly and inspection processes even now when robot technology has advanced to a high level of sophistication. This is because these processes include the delicate positioning of parts, tasks that require delicate force during mounting, and inspections that rely on human sensitivity, etc. However, because it is not the case that all tasks require manpower, automation through robots aimed at task efficiency and quality improvements must be advanced. Robots called collaborative robots*3, which can coexist with people and work collaboratively with them, are used here (Figure 3).
*3 Collaborative robots are equipped with features that ensure safety. They can coexist with people on the same site even without preparing a safety barrier and work while cooperating with people.
The progress of collaborative robots has been rather remarkable in recent years. Robots that are equipped with features that allow them to smoothly coordinate their work while keeping an eye on the progress of the work of people working beside them have already appeared. People differ in terms of their individual degree of work proficiency, and their work efficiency can change according to their physical condition and fatigue. Therefore, to increase the work efficiency within a process, the operations of the robot working together must be synchronized with a person's work progress.
The robots playing an active role in plants will likely continue to become more and more intelligent going forward. That progress is supported by the sensor technologies for collecting data, industrial networking technologies for sharing information between equipment and facilities, as well as the evolution of AI and other advanced information processing technologies. The importance of electronic components and semiconductors for smart robots will continue to increase in the future.

If you have any questions based on this article that you would like to discuss with an expert at Murata, don't hesitate to reach out. There's an entire team ready to support you with your question.