Spherical drone
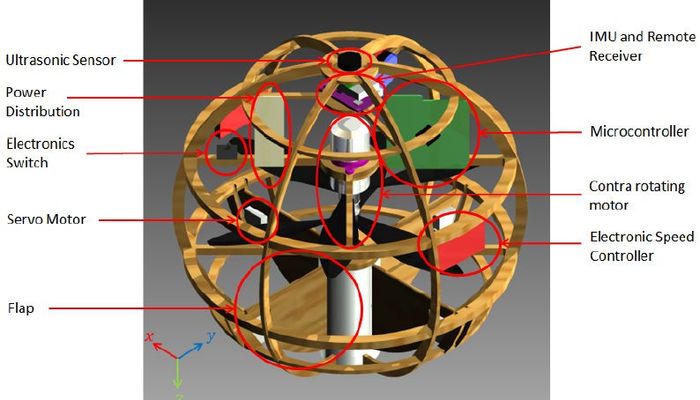
A coaxial, flap actuated, spherical UAV for operations in complex environments, such as buildings, caves or tunnels. The spherical design protects the inner components of the vehicle and allows the UAV to roll along the floor if the environment permits. The UAV can land and take-off from any orientation and come into contact with objects without puttingthe propellers at risk. Flaps at the base of the sphere will generate roll and pitch moments as opposed to conventional swash plate designs while the coaxial setup will providethe necessary yaw moments and increase in thrust to volume ratio of the system. The flaps, placed below the propellers allow for decoupled roll and pitch control in a thrust vectoring manner.





Technical Specifications
| Inner diameter | 22.6 |
| Weight | 0.59 |
| Microcontroller | |
| Servos | |
| IMU | |
| Propellors |
Overview
The spherical design protects the inner components of the vehicle and allows the UAV to roll along the floor if the environment permits. The UAV can land and take-off from any orientation and come into contact with objects without puttingthe propellers at risk.
Flaps at the base of the sphere will generate roll and pitch moments as opposed to conventional swash plate designs while the coaxial setup will providethe necessary yaw moments and increase in thrust to volume ratio of the system. The flaps, placed below the propellers allow for decoupled roll and pitch control in a thrust vectoring manner.
The compact size of the vehicle was achieved by the appropriate selection of components such as the
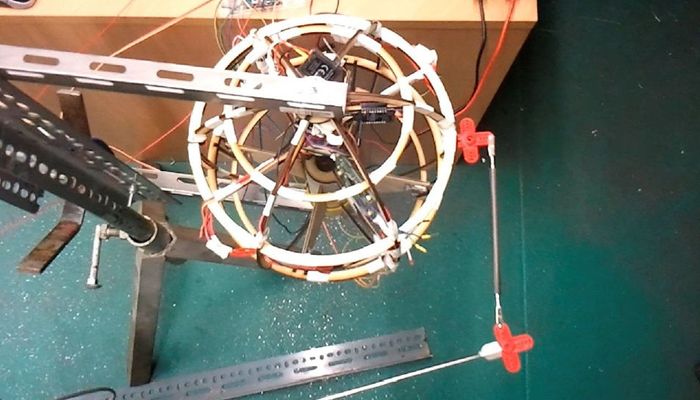
ultra-nano-size servos and the 3-blade propellers. The aerial vehicle light-weight structure was made from plywood. The material was used in the construction of the vehicles frame and flaps.
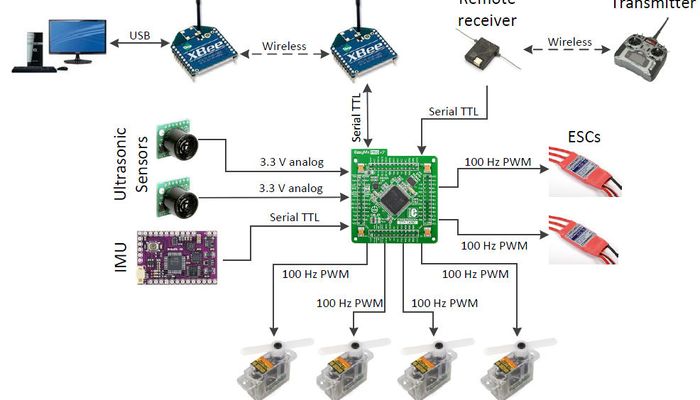
The hardware architecture is composed of an embedded system, sensors, communication modules, servos, and electronic speed controls (ESCs)
References
Describes the system design, structure, and system integration of the UAV. Discusses the control design, Ultrasonic Altitude Localization, and sensors.



Continue Reading

Civil engineers observe how flocks of animals avoid collisions to help devise safe, self-regulated systems for drones and driverless cars.

2 minutes read


The intersection of drones and wearables is opening the doors to the market of fitness drones


University of Aberdeen has partnered with Duke University to develop a UAV system capable of studying bottlenose dolphins to determine how environmental changes impact the populations
