Hubo Humanoid Robot
Huo is a biped walking humanoid robot. The inside frame is composed of aluminum alloy and its exterior is composite plastic. A lithium polymer battery located inside of HUBO allows the robot to be run for nearly 90 minutes without an external power source. All electrical and mechanical parts are located in the body, and the operator can access HUBO using wireless communications. HUBO can walk forward, backward, sideways, and it can turn around. Its maximum walking speed is 1.25km/h and it can walk on even ground or on slightly slanted ground.









Technical Specifications
| Weight | 55 |
| Height | 1.25 |
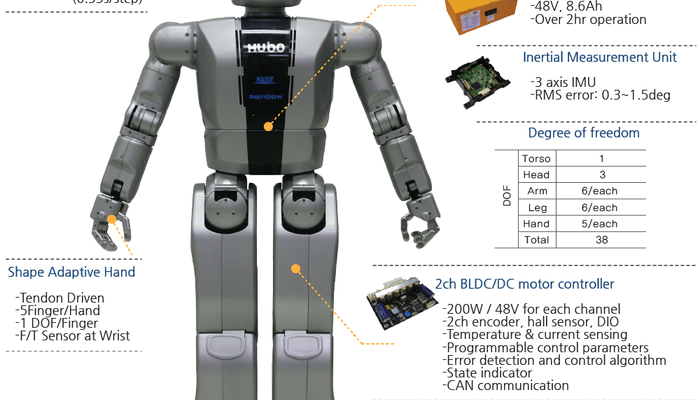
| Degrees of freedom (DOF) | 41 |
| Walking speed | 0 ~ 1.25 |
| Walking cycle, stride | 0.7 ~ 0.95 |
| Grasping force | 0.5 |
| Actuator | |
| Control unit | |
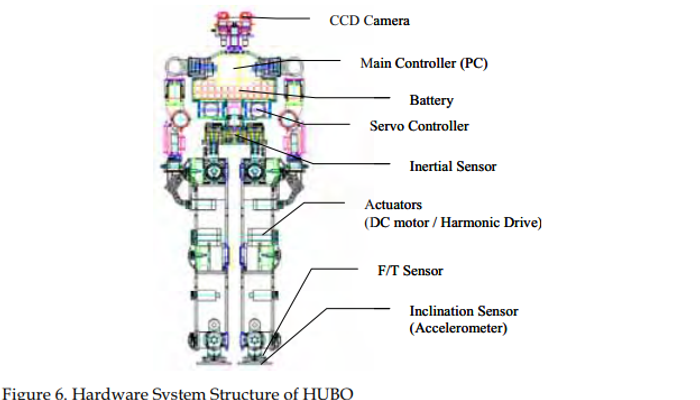
| Sensors | Foot |
| Torso | |
| Power section | Battery |
| External power | |
| Operation section | |
| Operating system |
Overview
The inside frame is composed of aluminum alloy and its exterior is composite plastic. A lithium polymer battery located inside of HUBO allows the robot to be run for nearly 90 minutes without an external power source. All electrical and mechanical parts are located in the body, and the operator can access HUBO using wireless communications. HUBO can walk forward, backward, sideways, and it can turn around. Its maximum walking speed is 1.25km/h and it can walk on even ground or on slightly slanted ground.
HUBO has enough degrees of freedom (DOF) to imitate human motions. In particular, with five independently moving fingers, it can imitate difficult human motions such as sign language for deaf people. Additionally, with its many sensors, HUBO can dance with humans. It has two CCD cameras in its head that approximate human eyes, giving it the ability to recognize human facial expressions and objects. It can also understand human conversation, allowing it to talk with humans.
References
Overall description of the project, including mechanical designs, hardware control system, and the development of an "Albert Einstein" version of the robot.



Continue Reading

Unitree launched its first humanoid robot H1 on August 15. Showcasing six months of hard work, the H1 humanoid stands about 71 inches (1800mm) tall, but only weighs about 100 lbs (47kg) and boasts unmatched power.

2 minutes read


Princeton researchers have created a new type of hydrogel that is recyclable, yet still tough and stable enough for practical use (and reuse).

3 minutes read


Robots and drones for the purpose of research and development.

4 minutes read
