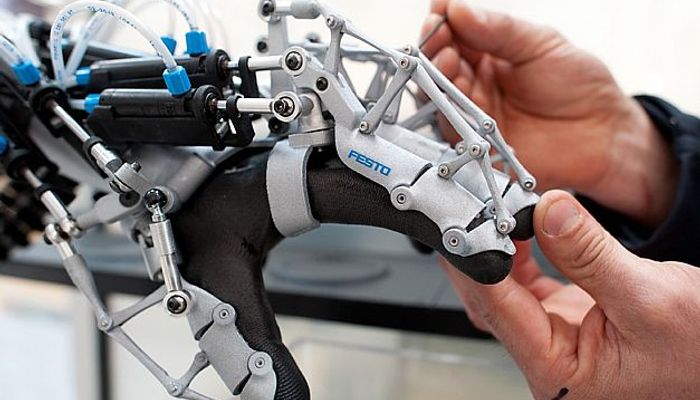
Exo Hand
An exoskeleton that can be worn like a glove and can also be used to operate an external robotic arm. The exoskeletal hand has all the principal physiological degrees of freedom of its human counterpart. It thus supports the human hand’s diverse techniques for grasping and handling objects. By means of force feedback, the person feels what the robot is gripping. This means that the human sense of touch can also be made use of across large distances and can even be applied at the interface between the real and virtual worlds. The shape of the ExoHand is adapted to the user’s own hand and made of polyamide using selective laser sintering (SLS).









Technical Specifications
| Pneumatic actuators | 8 |
| Production method | |
| Sensors | |
| Exoskeleton material | |
| Control | |
| Piezo proportional valves(robotic hand) | 8 |
| Piezo proportional valves (orthosis) | 16 |
Overview
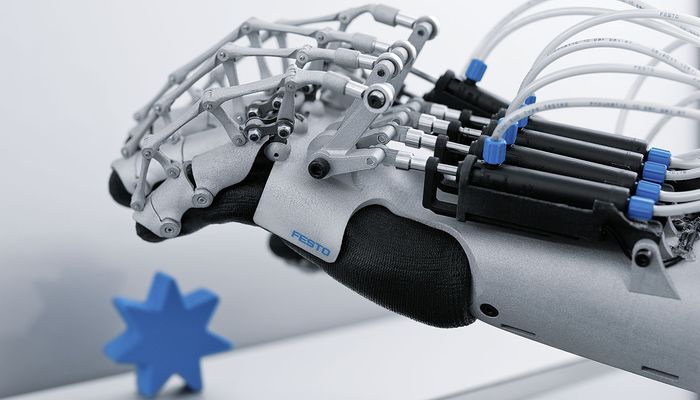
The exoskeletal hand has all the principal physiological degrees of freedom of its human counterpart. It thus supports the human hand’s diverse techniques for grasping and handling objects. By means of force feedback, the person feels what the robot is gripping.
This means that the human sense of touch can also be made use of across large distances and can even be applied at the interface between the real and virtual worlds. The shape of the ExoHand is adapted to the user’s own hand and made of polyamide using selective laser sintering (SLS).
References
Discusses the background of the project and describes the specifications of the hand. Also talks about the team and partners associated with the project.
Recommended Specs



Continue Reading

Researchers at Stanford Engineering have developed a lightweight, comfortable knit sleeve that uses pressure-based haptics to simulate touch, opening up new possibilities for wearable devices.

4 minutes read


KIT spin-off StraightUp aims to permanently relieve posture-related back pain

3 minutes read


Director of Installation and Maintenance for VodafoneZiggo, Nicole Hoebink lives “happily” in Den Bosch with her husband and her 14-year-old son. Walking their dogs is one of her favorite activities to relax and clear up her mind. Nicole has a background in economics.

5 minutes read
