New soft robotic drone from a shape and rigidity morphing mechanical metamaterial
Multifunctional shape-morphing material with reversible and rapid polymorphic reconfigurability implemented into a soft robotic morphing drone that autonomously transforms from ground to air vehicle and an underwater morphing machine.

05 Mar, 2022. 5 minutes read
![The researchers holding a piece of material that has been warped [Image Source: Virgnia Tech Blog]](https://image.wevolver.com/eyJidWNrZXQiOiJ3ZXZvbHZlci1wcm9qZWN0LWltYWdlcyIsImtleSI6IjAuamc5N3l4NGVtNHBTaGFwZWFuZHJpZ2lkaXR5bW9ycGhpbmdtZWNoYW5pY2FtZXRhbWF0ZXJpYWwucG5nIiwiZWRpdHMiOnsicmVzaXplIjp7IndpZHRoIjo4MDAsImhlaWdodCI6NDUwLCJmaXQiOiJjb3ZlciJ9LCJ3ZWJwIjp7InF1YWxpdHkiOjg1fX19)
The researchers holding a piece of material that has been warped [Image Source: Virgnia Tech Blog]
The ability to maintain complex shapes without consuming power while flexible to go between multiple states is usually uncommon in a single material system. Shape morphing materials with adjustable rigidity have become a key element of several technological breakthroughs, from soft robotics to multimodal vehicles. To design a material system with the above-mentioned abilities, the technique of incorporating Japanese artistic geometric shapes, cuts (kirigami) and folds (origami) on a flat sheet can result in 3D output shapes under deformation. These types of materials are called mechanical metamaterials that allow a greater degree of freedom and extensibility– but are limited due to reconfigurability and reversibility of such systems. Another method for developing shape morphing systems is to control material properties across the sheet which can be achieved by adjusting deformation through heterogeneous material stiffness. However, this shape expansion at different locations in the material requires continuous external stimuli– indicating that shape morphing cannot be achieved without constant applied stimuli or energy inputs.
A group of researchers affiliated with Macromolecules Innovation Institute and Department of Mechanical Engineering, Soft Materials and Structures Lab at Virginia Tech introduced a shape and rigidity morphing material that possesses capabilities like reversible and rapid polymorphic 3D reconfigurability and programmable stiffness [1]. Funded through Bartlett’s DARPA Young Faculty Award and Director’s Fellowship, the project led by Michael Bartlett, assistant professor in mechanical engineering explains, “when we started the project, we wanted a material that could do three things: change shape, hold that shape, and then return to the original configuration, and to do this over many cycles. One of the challenges was to create a material that was soft enough to dramatically change shape, yet rigid enough to create adaptable machines that can perform different functions.”
Shape-morphing mechanical metamaterial
Interestingly, the introduced shape-morphing mechanical metamaterial can rapidly morph into load-bearing shapes in less than 0.1 seconds while still maintaining the shape and stiffness reconfigurability. To attain the state of this mechanical metamaterial, the team created a kirigami composite metamaterial sheet that features shape morphing by nonlinear deformation of elastomeric kirigami architecture and shape fixing by the nonlinear material response from plasticity and phase change of the embedded low-melting-point alloy (LMPA). The composite material consists of an endoskeleton made up of an LMPA, an embedded heating layer and an elastomeric kirigami encapsulation. The LMPA is Field’s metal that is a homogenous mixture of bismuth, indium and tin that can change from a high elastic modulus solid to a flowable liquid at a low melting temperature of 62°C.
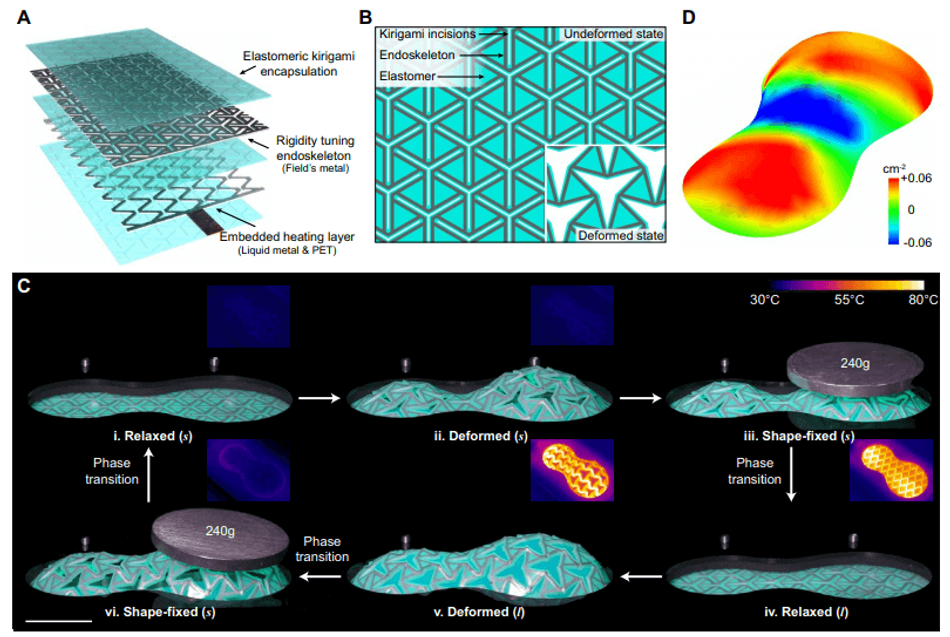
“These composites have a metal endoskeleton embedded into rubber with soft heaters, where the kirigami-inspired cuts define an array of metal beams. These cuts combined with the unique properties of the materials were really important to morph, fix into shape rapidly, then return to the original shape,” Hwang said.
Demonstrating the nonlinear force-extension characteristic, elastomeric kirigami architecture is capable of retaining high shapes during shape fixing in different configurations allowing high extensibility at minimum restoring force. The low-melting-point alloy exhibits material nonlinearities for shape morphing and can deform plastically at low strains– leveraging this to morph the material into load-bearing shapes. The shape of the material is reversible with the introduction of embedded heaters to melt the LMPA allowing the elastomeric kirigami architecture to reverse the plasticity and gain reconfigurability. The Gaussian curvature map (D) shows the negative and position region signifying the curved surface with complex curvature. The mechanical metamaterial overcomes the trade-offs between extensibility and load-bearing capability in a soft system– leading to the design of a functional morphing drone.
Soft robotic morphing drone
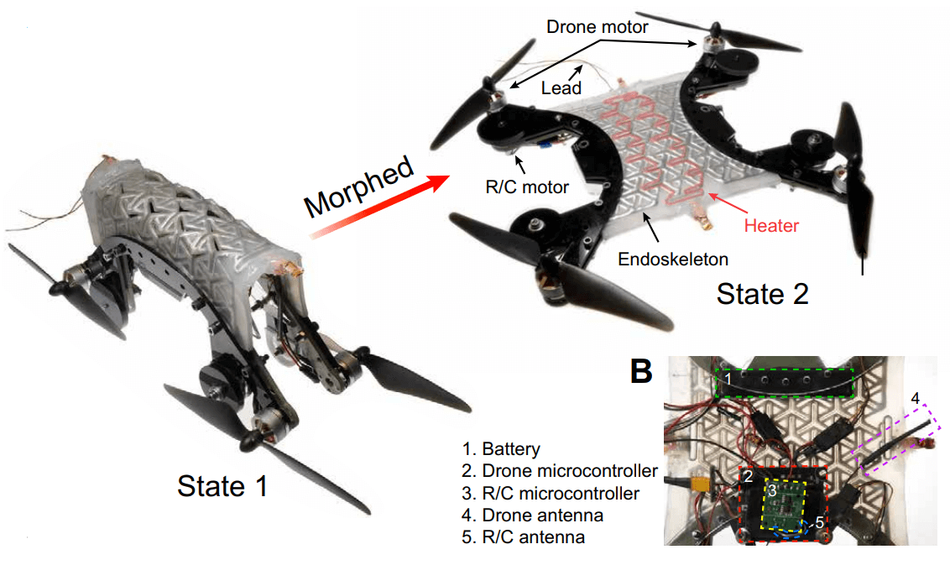
To evaluate the application of the proposed mechanical metamaterial, the group designed a soft robotic morphing drone integrated with onboard power, control, motors and embedded heaters. Thanks to the autonomous morphing from ground to air vehicle configuration enabling multiple remotely controlled locomotion modes– can be deployed to collect cargo through water propulsion and buoyancy control. The embedded heaters in the soft robotic drone help it shape and morph to enable autonomous transformation from driving state to flying state. The transition from driving in state 1 to air vehicle configuration in state 2 is possible because of the contact between copper wires on the drone and liquid metal layers deposited on a power transfer station that enabled transformation to occur with no external intervention.
“We’re excited about the opportunities this material presents for multifunctional robots. These composites are strong enough to withstand the forces from motors or propulsion systems, yet can readily shape morphs, which allows machines to adapt to their environment,” said Barron.
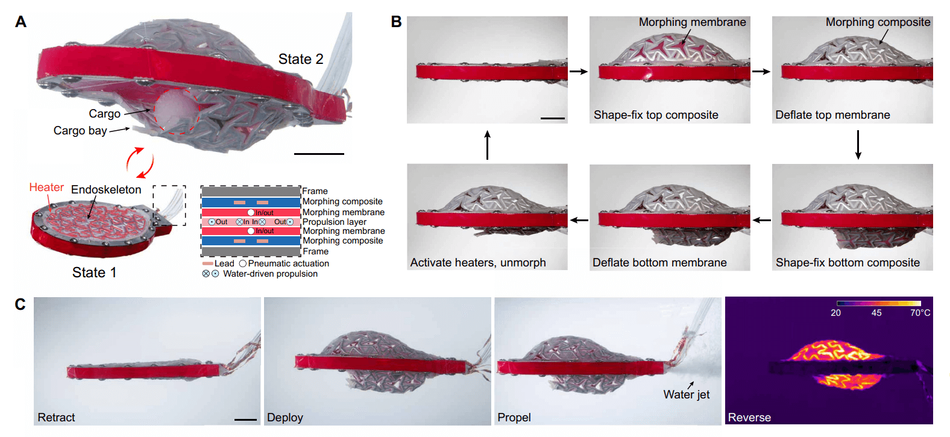
Employing kirigami composites to develop a deployable underwater machine that starts in a flat shape which is then sequentially morphed into a swimming state to interact with the environment for collecting cargo. After performing the task, the material is retracted into the original flat shape. “The underwater machine consists of multiple stacked layers, including morphing kirigami composites with embedded liquid metal heaters, inflatable pneumatic membranes, and water propulsion channels,” the team notes. The bottom layer is designed to collect cargo while the top layer controls buoyancy for locomotion. This implementation shows the reversible deployability of morphing kirigami structures into different functional applications.
The research article titled, “Shape morphing mechanical metamaterials through reversible plasticity is published in ScienceRobotics journal under closed-access terms. In the supplementary materials, the team has provided videos on the implementation of the soft robotic drone, changing its shape reversibly.
References
[1] D. Hwang, E. J. Barron, A. B. Haque, and M. D. Bartlett, “Shape morphing mechanical metamaterials through reversible plasticity,” Science Robotics, vol. 7, no. 63, 2022.