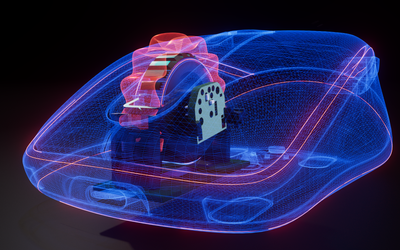
EPFL researchers have developed a customizable soft robotic system that uses compressed air to produce shape changes, vibrations, and other haptic, or tactile, feedback in a variety of configurations.

3 minutes read
Tagged with
EPFL researchers have developed a customizable soft robotic system that uses compressed air to produce shape changes, vibrations, and other haptic, or tactile, feedback in a variety of configurations.
3 minutes read
Azoteq's IQS39x family combines capacitive sensing and haptic feedback in a single compact IC, enabling more responsive, intuitive, and reliable user interfaces for next-gen consumer, industrial, and wearable devices.
Explore how FUTEK's precision sensors are driving innovations in surgical robotics.
Researchers at Stanford Engineering have developed a lightweight, comfortable knit sleeve that uses pressure-based haptics to simulate touch, opening up new possibilities for wearable devices.

4 minutes read
KIT spin-off StraightUp aims to permanently relieve posture-related back pain

3 minutes read